完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
電子發燒友網技術文庫為您提供最新技術文章,最實用的電子技術文章,是您了解電子技術動態的最佳平臺。
智能服務機器人正成為行業的風口浪尖,從清掃機器人開始,家庭陪伴機器人、送餐機器人等陸續進入公眾視線。...
在機器人行業,提到性能規范,一般是針對整機而言。評價工業機器人整機性能的指標有很多,基于不同的的設計目的以及用途,其整機配件搭配、結構設計以及參數調整也有所差異,控制系統只是其中的一個環節,發動機(伺服電機)、變速箱(減速器)、底盤/懸掛(結構件)等對機器人整體的性能都有很大的影響。...
場研究機構統計顯示,2015年中國工業機器人市場價值達13億美元,并將保持20%的年復合成長(CAGR),到2020年達到33億美元。工業機器人屬于智能機器人的一種,智能機器人發展迅速,下面跟隨小編一起,了解一下智能機器人中用到的三大關鍵技術。 ...
隨著中國制造業轉型步伐的加快,機器人的使用越來越頻繁,作為工廠里的技術工程師必需了解機器人的相關技術,那么通用機器人由什么部件組成呢?...
仿人型機器人由于具有類人的基本外形,在實際的生活中,能夠代替人完成很多工作,因此對仿人型機器人的研究具有實用價值,各國都在投入巨大的人力物力進行研發。...
隨著科學技術的發展,人類的研究活動領域已由陸地擴展到海底和空間。利用移動機器人進行空間探測和開發,己成為21世紀世界各主要科技發達國家開發空間資源的主要手段之一。...
庫卡機器人作為機器人和自動化技術領域的先驅,是全球領先的工業機器人制造商。庫卡公司的工業機器人種類齊全、多種多樣,幾乎涵蓋了所有負載范圍和機器人類型。本文將為您盤點庫卡機器人六款全世界技術前沿的機器人。...
一名合格的掃地機器人,應該要有一套智能的清掃系統,它賦予了掃地機器人靈魂,讓掃地機器人懂得思考,不再盲目亂掃亂撞,拒絕添堵!...
現今工業機器人的先進程度讓人嘆為觀止,尤其是那些靈動的5軸6軸機器人,具有如此多的關節,還能夠做到運動和指令的精確傳輸,各部位緊密配合完成復雜的工作,讓人不禁好奇它們的傳動系統到底是怎樣的,關節到底是什么結構的呢?...
相信屏幕前的各位看官應該都有過掃地的經歷,回想一下掃地的過程,可以分解為兩個主要的動作:走到某個位置;將其打掃干凈。與之相應的,作為人類掃地勞動的替代者——掃地機器人也包含兩個主要的系統:自主導航系統和清掃系統。...
工業機器人是面向工業領域的多關節機械手或者多自由度機器人,它的出現是為了解放人工勞動力、提高企業生產效率。工業機器人的基本組成結構則是實現機器人功能的基礎,下面讓我們一起來看一下工業機器人的結構組成。...
隨著智能化的程度提高,機器人傳感器應用越來越多。智能機器人主要有交互機器人、傳感機器人和自主機器人3種。從擬人功能出發,視覺、力覺、觸覺最為重要,早已進入實用階段,聽覺也有較大進展,其它還有嗅覺、味覺、滑覺等,對應有多種傳感器,所以機器人傳感產業也形成了生產和科研力量。...
一個人獨處時,感覺有點孤單,怎么辦?微軟亞洲研究院推出的“微軟小冰”,或許可以像閨蜜一樣地跟你聊天解悶。3.0版本的“小冰”除了具有“評顏值”“選搭配”等功能外,還基于深度學習技術具備強大的視覺識別能力。...
隨著近年來AGV等移動機器人技術的進步和產業升級改造的需求,AGV工業機器人系統的應用也逐漸成為企業在柔性生產設備和倉儲自動化升級的首選方案,但是通過對AGV機器人分布行業的特點分析以及我們多年來接觸的企業最終使用端的經驗來看,企業在AGV產品選擇上和整體AGV系統規劃上存在不少弊端和誤區。...
服務機器人正在以高速的增長速度加速步入我們的日常生活。根據IFR的最新統計,未來三年內,服務機器人市場規模將達到目前的5倍。正是基于廣闊的市場前景,美國國家科學基金會頒布了《美國機器人技術路線圖》,其中服務機器人作為單獨的一章重點論述。知己知彼,了解美國服務機器人發展動向,可更好地幫助我們與時俱進。...
與其視職場為機器不斷取代人力的零和游戲,何不從中發掘更多的職場可能性?聰明的人會考慮采取5個步驟,重新定義自己和機器的關系,以及重新定位自己的貢獻,和機器和平共存,能順利從電腦接棒和交棒給電腦的人,將是贏家。...
隨著科學技術的發展,探險、救災、排爆等危險場合工作的機器人,以及自動化生產中機器人的應用也日益廣泛。因此,智能救援機器人的研制已成為急需和必要,文章就智能救援機器人的設計進行了探討。...
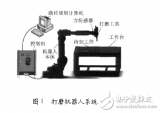
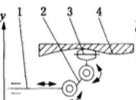
本文根據打磨機器人作業對位置和力同時控制的要求,在分析了基于位置伺服力/位混合控制策略的基礎上,對基于速度伺服的力/位混合控制策略進行了研究,對測量的力信號進行了濾波、重力補償及傳感器坐標系標定等處理,以提高所測力信號的抗干擾性和準確性。...
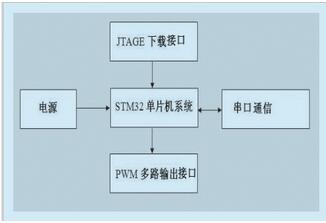
針對機器人主動柔順控制在工程中如何實現的問題,開發了一種開放式機器人控制器。此控制器采用“PC+PMAC”的控制結構,利用伺服驅動器的兩種不同的控制模式,提出了一種實用的力/位混合控制方案,給出了相應的硬件和軟件的具體實現。...
關注我們的微信

下載發燒友APP

電子發燒友觀察

版權所有 ? 湖南華秋數字科技有限公司
長沙市望城經濟技術開發區航空路6號手機智能終端產業園2號廠房3層(0731-88081133)
電子發燒友 (電路圖) 湘公網安備43011202000918 工商網監
湘ICP備2023018690號-1
工商網監
湘ICP備2023018690號-1





