
") 高精度地圖:自動駕駛發(fā)展的重要支撐
高精度地圖:自動駕駛發(fā)展的重要支撐
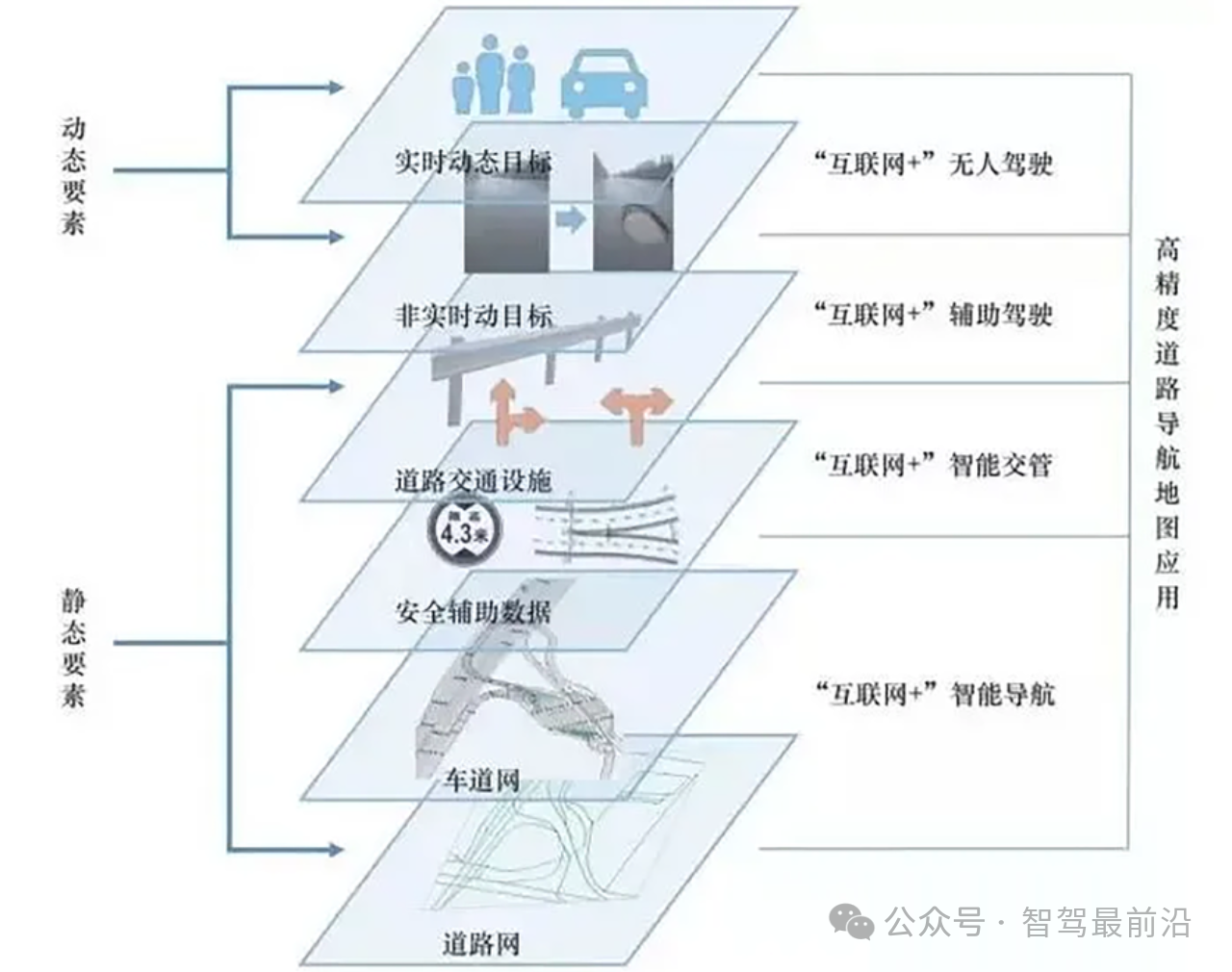
為了讓自動駕駛汽車可以在復雜的交通環(huán)境中安全行駛,精準、實時、全面的環(huán)境信息獲取是必不可少的。真實的交通環(huán)境千變萬化,只有讓自動駕駛汽車對諸如道路標識、路線規(guī)劃、車道線、交通信號燈及障礙物等周邊環(huán)境更好地進行理解,并可對多變的周邊環(huán)境做出決策,才可以有效提高自動駕駛汽車的駕駛安全性。為了讓自動駕駛汽車可以獲取更多的交通環(huán)境信息,在自動駕駛汽車設計上,提出了通過使用激光雷達、毫米波雷達、車載攝像頭等感知硬件讓自動駕駛汽車看得更加清楚,但由于感知硬件的局限性,在極端天氣、擁堵等復雜交通環(huán)境中,感知硬件取道的路信息并不足以讓自動駕駛汽車獨自完成駕駛,為此高精度地圖輔助自動駕駛的方案便被提了出來。高精度地圖作為一種數(shù)字地圖,包含了道路幾何信息、交通標識、交通燈、行人、建筑物及障礙物等豐富的交通環(huán)境信息。與普通的地圖不同的是,高精度地圖提供的交通環(huán)境信息更加豐富和準確,此外高精度地圖還可以幫助車輛提高定位和導航的精度和穩(wěn)定性,高精度地圖的建立和使用,對實現(xiàn)自動駕駛技術的可行性和安全性至關重要。高精度地圖,是自動駕駛技術發(fā)展的重要支撐。
高精度地圖技術方案
高精度地圖的建立需要收集和處理大量的數(shù)據(jù),以生成地圖數(shù)據(jù),主要包括地圖數(shù)據(jù)采集、地圖數(shù)據(jù)處理和地圖數(shù)據(jù)應用三個部分。
地圖數(shù)據(jù)采集
地圖數(shù)據(jù)采集是高精度地圖技術的第一步。通常采用的方法包括激光雷達、車載攝像頭和高精度定位等多種傳感器的融合,將環(huán)境中的數(shù)據(jù)收集下來。在數(shù)據(jù)采集的過程中,需要保證數(shù)據(jù)的精度、全面性和實時性。因此,在采集數(shù)據(jù)時,需要考慮車輛的位置、傳感器的精度、環(huán)境因素以及數(shù)據(jù)質量等多個因素。采集到的數(shù)據(jù)通常包括車道線、路口、交通標志、交通信號燈、障礙物等環(huán)境信息。
地圖數(shù)據(jù)處理
地圖數(shù)據(jù)處理是將采集到的數(shù)據(jù)進行加工處理,并生成高精度地圖的過程。數(shù)據(jù)處理的過程中,需要進行數(shù)據(jù)清洗、特征提取、地圖構建和數(shù)據(jù)更新等多個步驟。其中,數(shù)據(jù)清洗是指去除噪聲和無效數(shù)據(jù),以確保數(shù)據(jù)的準確性和一致性;特征提取是指從原始數(shù)據(jù)中提取特征信息,例如車道線、路口和交通標志等;地圖構建是將提取到的特征信息轉換為地圖數(shù)據(jù),包括路網、車道線、交通標志和障礙物等;數(shù)據(jù)更新是指將新采集到的數(shù)據(jù)加入到地圖中,以保證地圖數(shù)據(jù)的實時性和全面性。生成的地圖數(shù)據(jù)還需要進行儲存,以供后續(xù)使用,常用的儲存方法包括云存儲和分布式存儲等,隨著時間的推移,高精度地圖的數(shù)據(jù)還需進行更新,以確保高精度地圖數(shù)據(jù)的準確性和實用性。
地圖數(shù)據(jù)應用
地圖數(shù)據(jù)應用是將高精度地圖應用于輔助自動駕駛汽車行駛的過程。在自動駕駛汽車行駛過程中,高精度地圖可以提供精確的位置和路線信息,幫助車輛進行導航和行駛決策。同時,地圖中的環(huán)境信息還可以幫助自動駕駛汽車識別和避讓障礙物、識別交通標志和信號燈等。
高精度地圖應用場景
高精度地圖對于自動駕駛汽車來說非常重要,但除了給自動駕駛汽車提供精準的交通環(huán)境信息外,還有更廣泛的應用場景:
提供交通環(huán)境信息
自動駕駛汽車需要高精度地圖的輔助以獲得更多的交通環(huán)境信息,在高精度地圖的加持下,自動駕駛汽車可以了解周邊的道路、交通標識和交通燈等環(huán)境信息,從而做出相應的行駛決策。
提供最優(yōu)行駛路線
高精度地圖可以提高運輸效率、減少交通擁堵。自動駕駛汽車除了要獲取周邊交通環(huán)境信息,以確保安全行駛外,還需要為出行規(guī)劃行駛路線。通過輸入目的地信息后,高精度地圖可以幫助乘客規(guī)劃出最優(yōu)行駛路線,如果出現(xiàn)乘客希望在行駛過程中有其他的待停點或發(fā)現(xiàn)既定道路出現(xiàn)擁堵時,高精度地圖可以及時做出調整,優(yōu)化出行安排。
提供城市規(guī)劃參考
高精度地圖由于擁有準確的城市環(huán)境信息,可以為城市規(guī)劃提供重要的信息參考,通過高精度地圖上的信息,可以了解城市交通、公共設施、人流密集區(qū)等信息,給城市規(guī)劃提供重要的參考信息。此外高精度地圖還可以對交通流進行實時監(jiān)測、交通事故預警及車輛違法行為監(jiān)控等,為智慧城市、智慧交通建設提供更為全面的數(shù)據(jù)支持。
高精度地圖優(yōu)勢
高精度地圖在自動駕駛領域具有非常重要的優(yōu)勢。通過提供更準確和全面的位置信息、路況信息和環(huán)境信息,幫助自動駕駛車輛更好地進行定位和導航,提高行駛決策的可靠性和準確性,降低車輛識別和障礙物避讓的難度,提高用戶體驗,同時也降低了制圖成本,為自動駕駛車輛的商業(yè)化應用提供了強大的支持。
提高定位精度和導航精度
高精度地圖可以提供更準確的位置信息和導航信息,幫助自動駕駛車輛更精確地定位和導航。相較于傳統(tǒng)GPS定位方式,高精度地圖可以提供更高的精度,通常在幾厘米到十幾厘米之間。在車輛行駛過程中,高精度地圖可以提供更精確的位置和方向信息,幫助車輛更準確地進行路徑規(guī)劃和行駛決策。這對于自動駕駛車輛而言是非常重要的,因為它們需要對路況和環(huán)境做出準確的判斷和決策,才能保證行駛的安全和穩(wěn)定。
提高駕駛決策的可靠性和準確性
高精度地圖可以提供更全面和準確的路況和環(huán)境信息,幫助自動駕駛車輛做出更可靠和準確的駕駛決策。通過地圖中的路況信息,車輛可以更好地判斷當前行駛狀態(tài),并做出相應的駕駛決策。此外,高精度地圖還可以提供實時的交通信息,幫助車輛避開擁堵路段,選擇更快捷的路線。這些信息對于自動駕駛車輛的行駛決策非常重要,可以有效地提高行駛的安全性和效率。
提高車輛識別和障礙物避讓能力
高精度地圖中包含了車道線、路口、交通標志、障礙物等多種環(huán)境信息,這些信息可以幫助車輛更好地識別和避讓障礙物,提高行駛的安全性。通過地圖中的車道線信息,車輛可以更準確地判斷當前所處車道,從而更好地進行車道保持和轉換。通過地圖中的障礙物信息,車輛可以及時發(fā)現(xiàn)并避讓前方障礙物,避免發(fā)生事故。這些信息對于自動駕駛車輛而言非常重要,可以提高車輛的識別和障礙物避讓能力,從而保證行駛的安全性和穩(wěn)定性。
改善用戶體驗
高精度地圖可以提高自動駕駛車輛的行駛效率和安全性,從而改善用戶體驗。自動駕駛汽車可以通過高精度地圖提供的實時路況信息,選擇更快捷的路線,減少行駛時間和交通擁堵。此外,高精度地圖可以提供更準確的預計到達時間,幫助用戶更好地規(guī)劃行程。這些都可以提高用戶的出行體驗和滿意度,增強用戶對自動駕駛汽車的信任和接受度。
降低制圖成本
高精度地圖可以通過衛(wèi)星遙感技術、激光雷達等多種技術手段獲取地面特征和路況信息,然后通過云計算等技術手段進行數(shù)據(jù)處理和制圖。相比傳統(tǒng)的人工制圖方式,高精度地圖可以大大降低制圖成本,提高生產效率,從而為自動駕駛汽車的商業(yè)化應用提供更好的支持。
高精度地圖劣勢
高精度地圖雖然在自動駕駛領域具有許多優(yōu)勢,但也存在前提投入成本高、數(shù)據(jù)更新困難、對車輛硬件要求高和隱私安全問題等劣勢,這些問題需要通過技術創(chuàng)新和政策引導等手段加以解決。
前提投入成本高
雖然相比傳統(tǒng)的人工制圖方式,高精度地圖制圖成本較低,但仍然需要大量的資金和技術投入。高精度地圖制作需要采用各種先進的地圖制圖技術和設備,如衛(wèi)星遙感技術、激光雷達等,這些技術和設備的成本非常高昂。此外,高精度地圖的制作還需要大量的人工編輯和數(shù)據(jù)處理,增加了制作成本。
數(shù)據(jù)更新困難
高精度地圖需要不斷更新,以反映城市和道路等基礎設施的變化。然而,數(shù)據(jù)更新需要大量的人力物力投入,而且更新的速度跟不上城市基礎設施建設的變化速度,因此高精度地圖的數(shù)據(jù)更新一直是一個難題。
對硬件要求高
高精度地圖需要實時的高精度定位和傳感器數(shù)據(jù)支持,這就要求自動駕駛汽車必須配備高精度定位系統(tǒng)和多種傳感器,如高精度GPS、激光雷達、攝像頭等。這些設備不僅增加了自動駕駛的成本,還需要額外的功耗和空間,影響自動駕駛的設計和性能。
隱私安全問題
高精度地圖需要收集大量的位置數(shù)據(jù)和路況數(shù)據(jù),這些數(shù)據(jù)涉及到用戶的隱私,一旦泄露或被惡意利用,將對用戶造成極大的危害。因此,高精度地圖的隱私安全問題一直是一個值得關注的問題。
高精度地圖未來發(fā)展趨勢
從理論上來說,自動駕駛汽車可以僅通過感知硬件來實現(xiàn)對交通環(huán)境的感知,然而在實際應用時,僅通過感知硬件無法使自動駕駛汽車足夠地安全和高效,高精度地圖的使用可以有效提高自動駕駛汽車的感知精度、行車安全性和駕駛效率,高精度地圖可以提供更加準確的路況信息、交通標識及行人等重要的環(huán)境信息,讓自動駕駛汽車更加可靠和實用。隨著自動駕駛技術的不斷發(fā)展和應用,高精度地圖也將不斷發(fā)展和完善。
更高的精度和覆蓋范圍
未來高精度地圖將會更加精準和全面,將涵蓋更多的城市和道路網絡,并提供更多的實時信息。未來的高精度地圖將通過更高精度的數(shù)據(jù)采集和處理技術,來提高地圖的精度和準確性。
更多元化的應用場景
除了自動駕駛技術之外,高精度地圖還將應用到更多的領域,如智慧城市、物流配送、公共安全等。未來高精度地圖將能夠提供更多的實時信息和服務,幫助人們更好地管理城市和生活。
更高效的數(shù)據(jù)更新和管理
高精度地圖的數(shù)據(jù)更新和管理一直是一個難題,未來的高精度地圖將會通過更高效的數(shù)據(jù)采集和處理技術,來提高地圖的數(shù)據(jù)更新速度和管理效率。同時,未來的高精度地圖還將能夠與實時路況信息相結合,實現(xiàn)動態(tài)更新和管理,以提供更加實時和準確的地圖信息。
隱私保護更加全面
高精度地圖會涉及到大量的位置和道路信息,這將涉及到用戶的隱私信息。隱私安全一直是一個重要的問題。未來的高精度地圖將會通過更加安全的數(shù)據(jù)采集和管理方式,來保護用戶的隱私和安全。同時,未來的高精度地圖還將能夠更好地應對網絡安全和惡意攻擊等問題,提高地圖的安全性和可靠性。
在自動駕駛汽車的發(fā)展過程中,高精度地圖承擔著重要的支撐作用,高精度地圖將會不斷發(fā)展和完善,成為智慧城市和智能交通領域的重要基礎設施,為人們提供更加準確和實時的地圖信息和服務。同時,隨著高精度地圖的應用不斷擴大和深化,也需要更加重視地圖數(shù)據(jù)的隱私安全和管理問題,以保護用戶的權益和安全。
審核編輯黃宇
-
自動駕駛
+關注
關注
788文章
14177瀏覽量
169287 -
汽車
+關注
關注
13文章
3786瀏覽量
39169
發(fā)布評論請先 登錄
愛普生高精度車規(guī)晶振助力激光雷達自動駕駛

激光雷達技術:自動駕駛的應用與發(fā)展趨勢

康謀方案 | BEV感知技術:多相機數(shù)據(jù)采集與高精度時間同步方案
從《自動駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動駕駛中的重要性

一文聊聊自動駕駛測試技術的挑戰(zhàn)與創(chuàng)新

自動駕駛中常提的SLAM到底是個啥?

l4級別自動駕駛的特點是什么
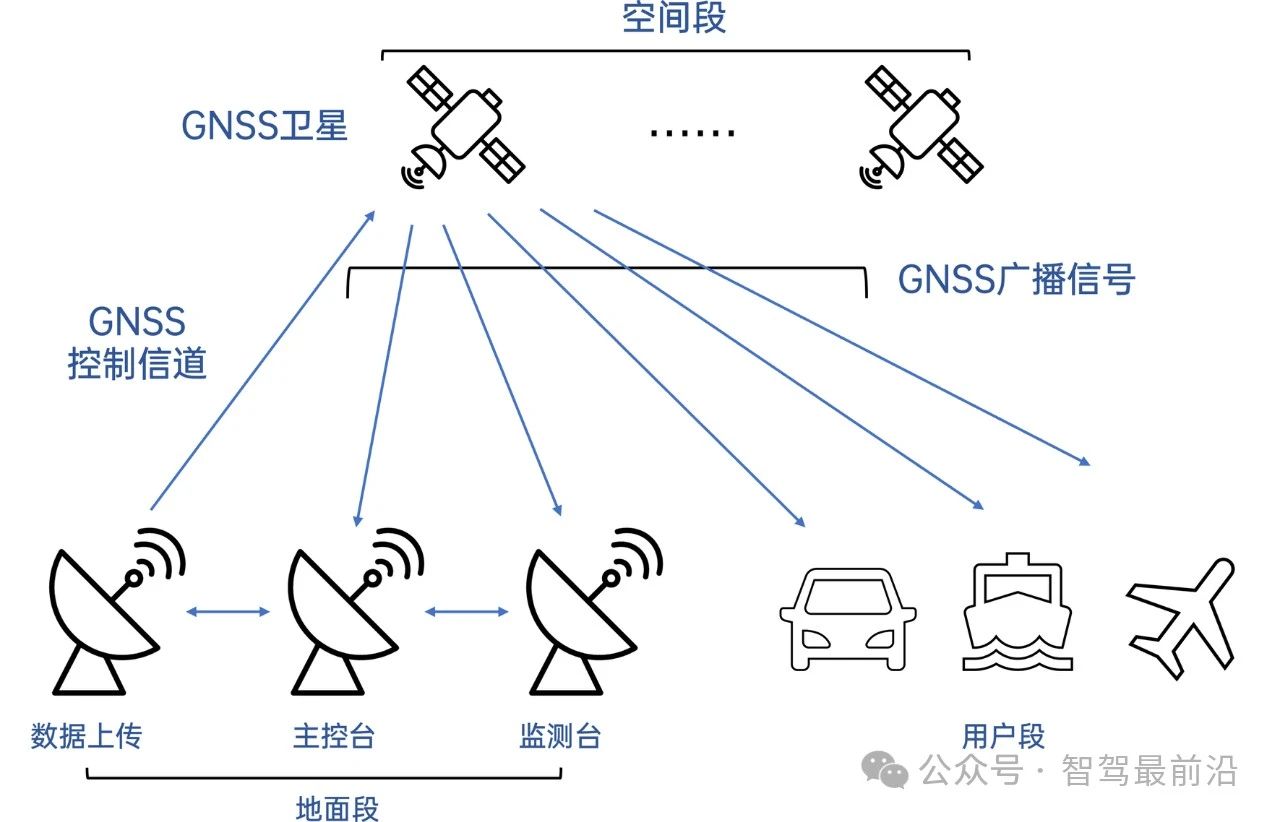
為什么自動駕駛中全球導航衛(wèi)星系統(tǒng)如此重要?
自動駕駛的未來之路:智能網聯(lián)與單車智能的交融
自動駕駛無圖方案真的可行嗎?
FPGA在自動駕駛領域有哪些優(yōu)勢?
FPGA在自動駕駛領域有哪些應用?
拋棄高精度地圖舊模式,走向視覺感知新時代?
自動駕駛仿真測試實踐:高精地圖仿真

自動駕駛:揭秘高精度時間同步技術(一)






 工商網監(jiān)
工商網監(jiān)

評論