


第10步:將ESC安裝到機(jī)臂上
現(xiàn)在,機(jī)架的核心已經(jīng)成型,我們可以開始將各個(gè)部件安裝到機(jī)臂上了。您可以用扎帶將每個(gè)ESC固定在機(jī)臂的下方,如下圖所示。

圖16:用軋帶固定在機(jī)架機(jī)臂上的ESC
第11步:用螺栓電機(jī)安裝到機(jī)臂上
請將電機(jī)安裝到每個(gè)機(jī)臂的末端,電機(jī)的旋轉(zhuǎn)方向如下圖所示。電機(jī)的旋轉(zhuǎn)方向位于電機(jī)側(cè)面。比如,請?jiān)谧蠛蠓桨惭b一個(gè)逆時(shí)針電機(jī),在左前方安裝一個(gè)順時(shí)針電機(jī)。
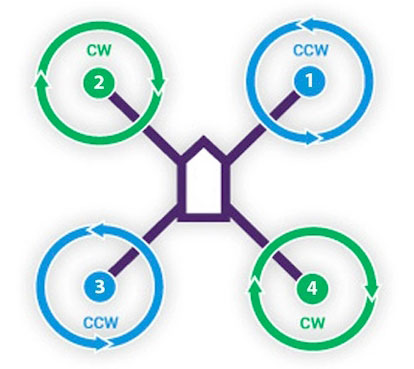
圖17:NAZA的電機(jī)編號定義 / ?kenstone6.net
第12步:將電機(jī)引線連至ESC

圖18:三根電機(jī)線已連至ESC
請將每個(gè)電機(jī)的三根引線連至相鄰ESC正面的三個(gè)孔中。此時(shí),導(dǎo)線的連接順序無所謂。(如有必要,我們將在第2部分中更正線序)。
NAZA-M Lite附帶的這個(gè)小模塊集成了LED指示燈(比如電池電量低警告、良好的GPS鎖定指示)以及連接PC的USB接口。LED模塊如下圖所示。將長導(dǎo)線的一端連接到NAZA-M Lite背面標(biāo)有“LED”的插槽中。我們會在本教程的第2部分用該USB接口配置飛行控制器。我用熱熔膠將該模塊粘在了左后機(jī)臂的側(cè)面。

圖19:后機(jī)臂上的NAZA-M Lite LED指示模塊
第14步:安裝GPS
NAZA-M Lite附帶的GPS有一個(gè)安裝桿。將GPS安裝在這個(gè)安裝桿上可以增加電機(jī)和ESC與GPS之間的距離,從而減少電磁干擾的可能。GPS桿分為三部分:底座,有四根腿;一根細(xì)長桿(緊密連接底座和頂部,連接處有膠水);用來安裝GPS的平坦頂部。我把GPS安裝桿安裝在機(jī)架的右后端。GPS線末端的接頭與LED模塊的接頭相同。請將GPS線連至相鄰LED模塊的“EXP”插槽中。

圖20:安裝在機(jī)架頂部的GPS
第15步:安裝Raspberry Pi
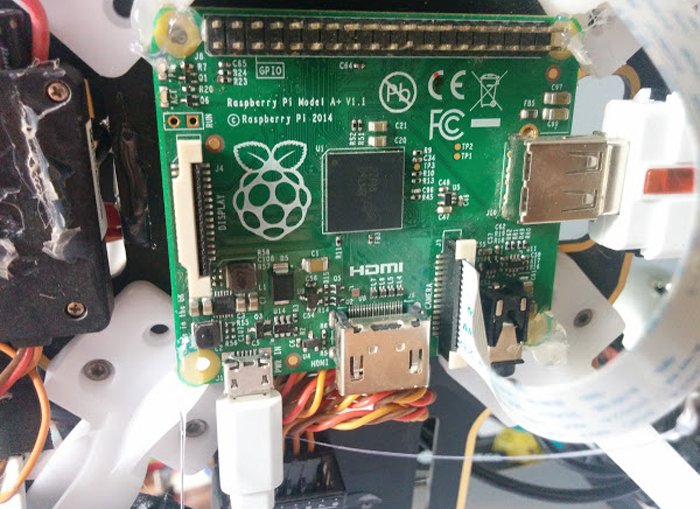
圖21:安裝在機(jī)架底部的Raspberry Pi
我發(fā)現(xiàn)安裝Raspberry Pi最方便的地方是在支腿與機(jī)架連接處之間的底板上(請參見上圖)。請將GPIO引腳的方向朝下,并讓USB端口對著電池接頭。Raspberry Pi無法與底板平坦接觸,因此不能用雙面膠粘貼。我用熱熔膠將四個(gè)角固定在支腿上。
第16步:安裝穩(wěn)壓器
我們處理四軸飛行器的底部時(shí),可以將穩(wěn)壓器粘在其導(dǎo)線焊接處正下方的底板上。
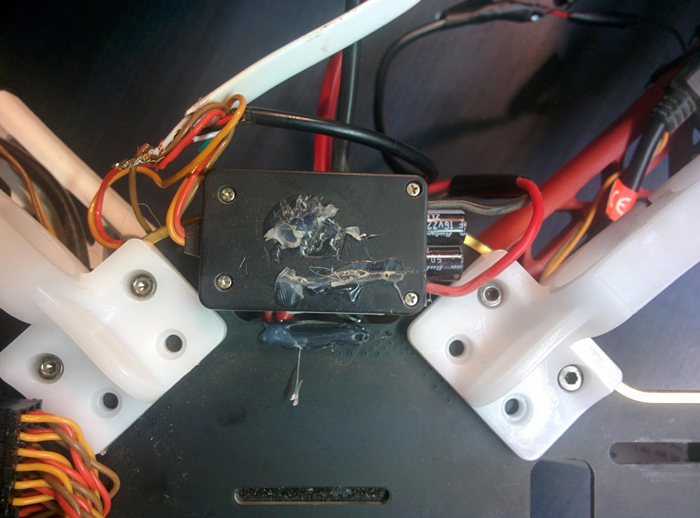
圖22:兩個(gè)白色支腿之間的黑色矩形穩(wěn)壓器
第17步:安裝Raspberry Pi相機(jī)
由于Raspberry Pi相機(jī)的目的是提供四軸飛行器飛行前方的實(shí)時(shí)視圖,因此應(yīng)將其安裝在四軸飛行器的前部。我用熱熔膠將一小塊紙板粘到兩個(gè)機(jī)臂之間的機(jī)架前部,然后再將Raspberry Pi相機(jī)粘到紙板上(請參見下圖;我的相機(jī)帶有廣角鏡頭,因此您的相機(jī)看起來可能略有不同)。
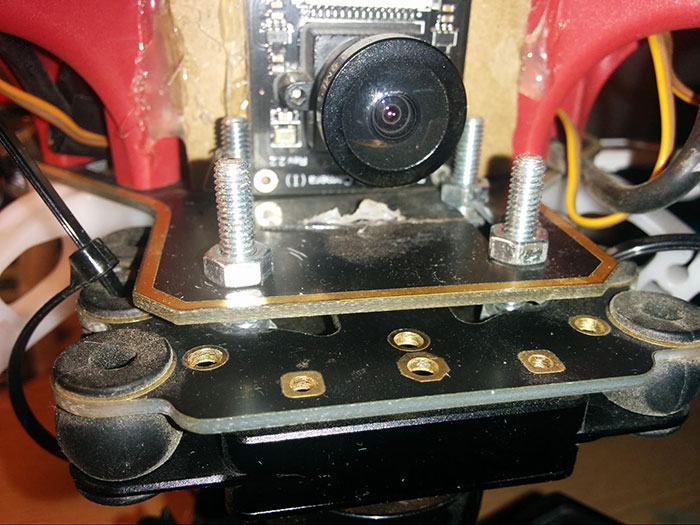
圖23:圖的上半部分是獲取四軸飛行器第一人稱視角(FPV)影像的Raspberry Pi相機(jī)。圖的下半部分是我們即將安裝的萬向節(jié)的頂部。
您的Raspberry Pi相機(jī)應(yīng)該已經(jīng)自帶一根排線。排線的另一端必須連接到四軸飛行器底部的Raspberry Pi。首先將排線滑過紙板的后方,并穿過正下方的孔;然后稍微彎曲排線,讓線上的裸露金屬朝向USB端口的相反方向。

圖24:相機(jī)與Raspberry Pi的連接
要將排線連至Raspberry Pi,請輕輕拉開標(biāo)有CAMERA的黑色接頭(HDMI端口和音頻輸出/復(fù)合視頻輸出端口之間)上的白色蓋子。請用力插入排線,以確保線纜均勻插入。抓緊排線,同時(shí)用我們先前打開的白色蓋子將排線鎖定在適當(dāng)位置。
第18步:用穩(wěn)壓器為飛行控制器和Raspberry Pi供電
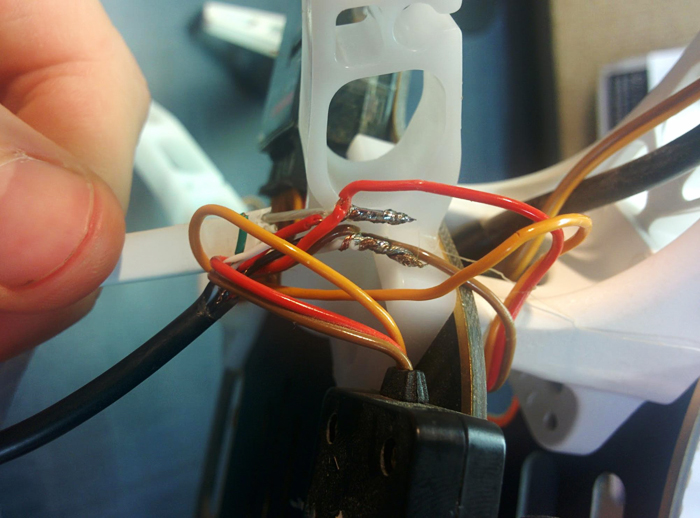
圖25:穩(wěn)壓器的棕色和紅色導(dǎo)線焊接到Micro USB線的正極和負(fù)極導(dǎo)線
我們之前安裝的穩(wěn)壓器可提供5V輸出,很方便地為飛行控制器供電。我們也可以利用該5V電源為Raspberry Pi供電。為此,我切開來自穩(wěn)壓器的PWM信號線的紅色和棕色線,分別將它們焊接到Micro USB線的正極(紅色)和負(fù)極(黑色/棕色)。請務(wù)必將PWM信號線的末端也焊接到該新線束上!否則,您將無法為飛行控制器供電。然后只需將Micro USB數(shù)據(jù)線插入Raspberry Pi即可為其供電。
要為飛行控制器供電,請將穩(wěn)壓器的PWM信號線連至飛行控制器背面的X3插槽。
第19步:安裝防抖萬向節(jié)

圖26:安裝橡膠球后的萬向節(jié)側(cè)視圖
萬向節(jié)通過六個(gè)防抖橡膠球連接到四軸飛行器的機(jī)架上,這些橡膠球是抵消相機(jī)抖動和旋轉(zhuǎn)運(yùn)動的第一道屏障。要安裝橡膠球,您必須先將其裝入萬向節(jié)下部的小孔中,然后將球的頂部裝入萬向節(jié)的頂板中。為了防止萬向節(jié)在飛行中脫落(比如防抖球碰巧損壞),我在萬向節(jié)兩側(cè)中間的球孔內(nèi)各綁了一根軋帶。這一步完成后,機(jī)架的樣子應(yīng)與上圖類似。
第20步:用螺栓將萬向節(jié)固定到機(jī)架的前部延伸部分
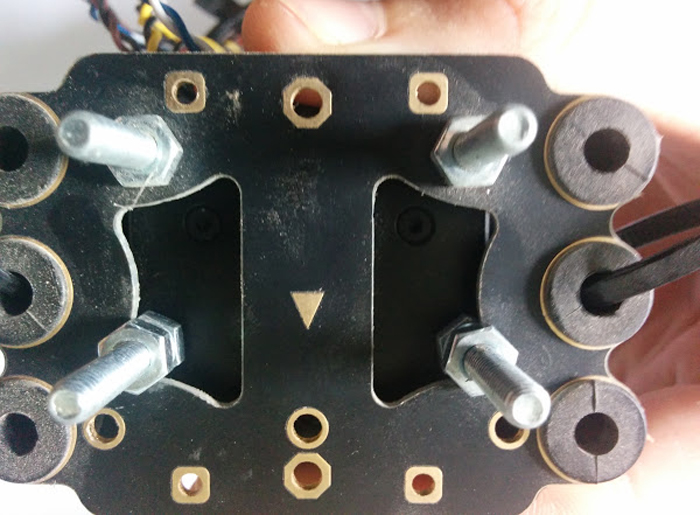
圖27:已安裝螺栓的萬向節(jié)頂視圖
為了減少在快速轉(zhuǎn)彎時(shí)四軸飛行器的支腿進(jìn)入拍攝畫面的可能性,我決定用螺栓將萬向節(jié)固定到機(jī)架的前部延伸部分(如果將萬向節(jié)安裝在機(jī)架中心下方的話,那么支腿更容易出現(xiàn)在拍攝畫面中)。為此,我將M3螺栓的頭部(您也可以使用M4的螺母和螺栓,但是需要將兩個(gè)后孔的尺寸稍微擴(kuò)大一點(diǎn))插入萬向節(jié)頂板的兩個(gè)孔內(nèi),將另外兩個(gè)M3螺栓插入寬闊開口的右下角(請參閱上文螺栓的放置位置;請注意,小箭頭方向表示萬向節(jié)的前方)。
然后,我在每個(gè)螺栓上安裝螺母并擰緊,將其固定在萬向節(jié)上。要將萬向節(jié)固定到機(jī)架上,我將螺栓滑入機(jī)架前部延伸部分的兩排開口中,并用螺母將其固定(有關(guān)將萬向節(jié)用螺栓固定到機(jī)身前部的外觀,請參見下文)。

圖28:Raspberry Pi相機(jī)和萬向節(jié)前視圖
第21步:制作一根單獨(dú)的電池接頭延長線,并將其焊到萬向節(jié)電源線上
為了讓FeiYu Tech Mini 3D萬向節(jié)正常工作,必須將其連至電池。我特意制作了一根電池接頭延長線,同時(shí)剪掉了萬向節(jié)電源線上的JST接頭,然后將電源線焊接到延長線上。該延長線由一個(gè)公T型頭、一個(gè)母T型頭和焊在中間的萬向節(jié)電源線組成。使用延長線之后,我們不必將萬向節(jié)電源直接焊接到配電板上。這樣,運(yùn)輸時(shí)可以從機(jī)架上卸下萬向節(jié),或者可以實(shí)現(xiàn)沒有萬向節(jié)情況下的飛行可能。
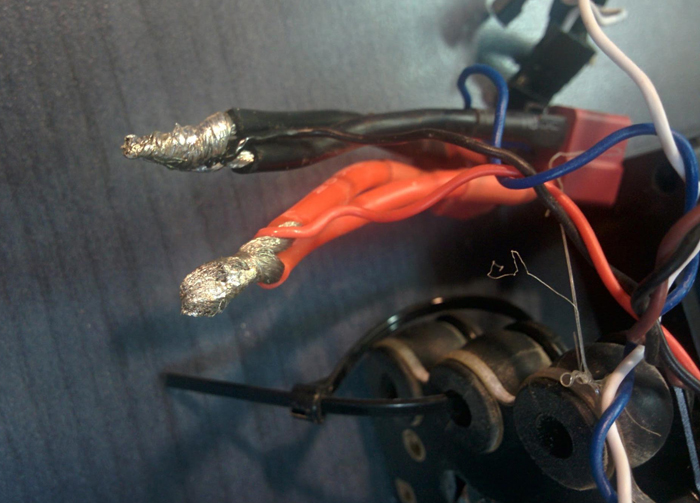
圖29:萬向節(jié)導(dǎo)線(上面的紅色和黑色細(xì)線)焊接到延長線上的方式
第22步:將相機(jī)安裝在萬向節(jié)上

圖30:安裝在萬向節(jié)上的Xiaomi Yi相機(jī)
此項(xiàng)目中使用的Xiaomi Yi相機(jī)比該萬向節(jié)設(shè)計(jì)配套的GoPro稍大。但是,如果您先擰入支架的底部螺栓,然后再擰緊頂部,Xiaomi Yi相機(jī)仍然可以正常安裝,無需對萬向節(jié)進(jìn)行任何修改。
第23步:將手機(jī)支架安裝到發(fā)射器上

圖31:安裝在發(fā)射器背面的手機(jī)支架
具體手機(jī)支架的安裝步驟可能會有所不同,對于我的手機(jī)支架,我只是用了一塊比支架吸盤稍大的帶有雙面膠的圓盤。我首先用雙面膠帶將該圓盤牢固地粘在發(fā)射器的背面。然后,將吸盤也就是手機(jī)支架固定到發(fā)射器上。將支架的金屬板(手機(jī)支架自帶)粘到手機(jī)外殼上之后,請掰彎支架的柔性機(jī)械臂,以便在正常握住發(fā)射器的情況下可以看到手機(jī)屏幕。手機(jī)支架的側(cè)視圖請參見上圖。
手機(jī)支架末端的磁鐵通過上述金屬板將手機(jī)固定在支架上。
第24步:安裝發(fā)射器電池
只需取下發(fā)射器的電池蓋,然后將AA電池安裝在電池盒中即可。然后,請根據(jù)兩個(gè)引腳附近印制的極性(如下圖所示,發(fā)射器的電池槽內(nèi)部視角)將電池盒的小接頭插入發(fā)射器。
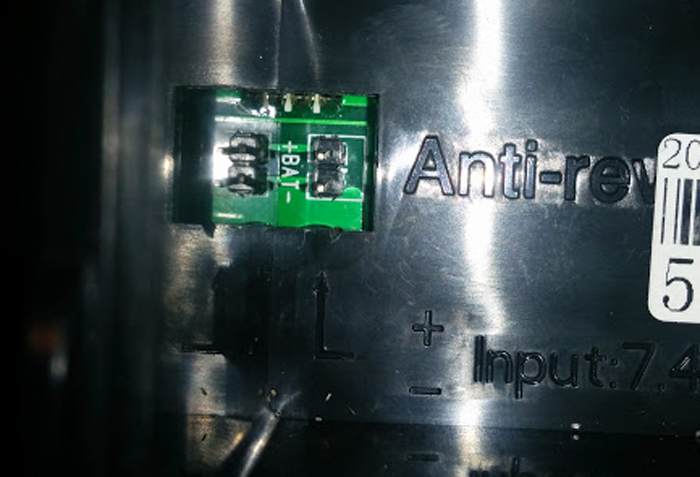
圖32:發(fā)射器的電池連接器

圖33四軸飛行器的側(cè)視圖
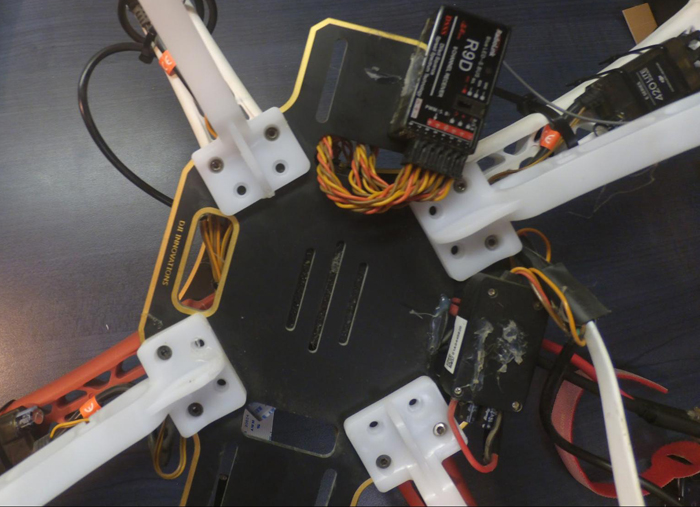
圖34:四軸飛行器的底視圖(照片中沒有Raspberry Pi)
恭喜!您剛剛完成了航拍四軸飛行器的組裝。然而,該四軸飛行器目前無法正常飛行。在第2部分和第3部分中,我們將描述如何配置四軸飛行器的軟件、學(xué)習(xí)如何飛行并進(jìn)行一些飛行測試。我們會在下個(gè)月完成該項(xiàng)目的下一階段。敬請期待!







 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論