其中,SLAM算法插件提供了SLAM領(lǐng)域流行的優(yōu)秀算法,包括DSO,ORBSLAM,SVO和TheiaSFM等,這些插件可以直接集成到自己的代碼中,研究人員也可以基于這些插件進(jìn)行進(jìn)一步研究或者貢獻(xiàn)自己的插件。此外Rviz也被集成到了這一框架中進(jìn)行可視化交互,讓用戶可以復(fù)用ros中的技能和知識。
2019-03-07 09:42:59 7899
7899 
SLAM系統(tǒng)分為建圖、定位和導(dǎo)航三部分,建圖算法使用Google Cartographer 2D建圖,這是Google在2016年開源的一套商業(yè)建圖算法,穩(wěn)定性和精度相對較高。
2022-07-01 13:02:022171 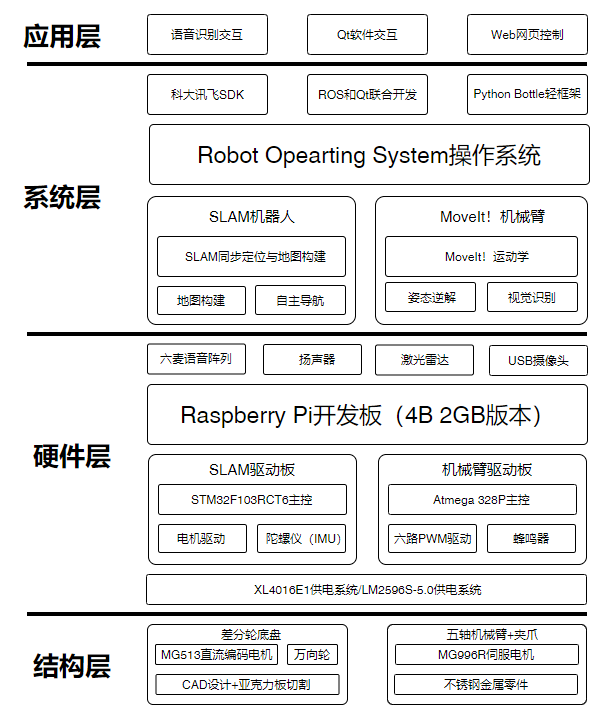
提出了一種使用低成本無人機(jī)實(shí)時(shí)生成探索地圖的解決方案。這依賴于Tello Edu無人機(jī)提供的信息,該無人機(jī)將圖像流式傳輸?shù)酵獠抗P記本電腦上以進(jìn)行實(shí)時(shí)處理。該解決方案運(yùn)行單目視覺 SLAM來注冊圖像并創(chuàng)建未縮放的環(huán)境地圖。
2022-08-29 16:02:571332 本文提出了一個(gè)魯棒且快速的多模態(tài)語義 SLAM 框架,旨在解決復(fù)雜和動態(tài)環(huán)境中的 SLAM 問題。具體來說,將僅幾何聚類和視覺語義信息相結(jié)合,以減少由于小尺度對象、遮擋和運(yùn)動模糊導(dǎo)致的分割誤差的影響。
2022-08-31 09:39:141300 相較于激光雷達(dá)SLAM系統(tǒng),視覺SLAM系統(tǒng)具有不主動發(fā)出信號的優(yōu)點(diǎn)。此外,視覺是對環(huán)境的稠密感知,可以利用視覺特征構(gòu)建出更符合人類感知的環(huán)境地圖。
2022-12-21 16:18:092451 上周的組會上,我給研一的萌新們講解什么是SLAM,為了能讓他們在沒有任何基礎(chǔ)的情況下大致聽懂,PPT只能多圖少字沒公式,這里我就把上周的組會匯報(bào)總結(jié)一下。 這次匯報(bào)的題目我定為“視覺SLAM:一直在
2023-08-21 10:02:071570 
激光SLAM局部定位精度高但全局定位能力差且對環(huán)境特征不敏感,而視覺SLAM全局定位能力好但局部定位相對激光雷達(dá)較差,兩者融合可以提高SLAM系統(tǒng)的精度和魯棒性。
2023-10-23 11:01:14646 
也將SLAM分為激光SLAM和視覺SLAM。激光SLAM比視覺SLAM起步早,在理論、技術(shù)和產(chǎn)品落地上都相對成熟。基于視覺的 SLAM 方案目前主要有兩種實(shí)現(xiàn)路徑,一種是基于 RGBD 的深度攝像機(jī)
2018-12-06 10:25:32
研究生期間進(jìn)行了基于2D激光雷達(dá)的SLAM的研究,當(dāng)時(shí)主要做了二維激光雷達(dá)的數(shù)據(jù)處理。小弟不才,沒有入得了SLAM的坑,卻一直謎之向往,如今得以機(jī)會,決定正式邁出第一步,徹底進(jìn)入SLAM的坑!心中
2021-08-30 06:13:31
如何使用核心模塊開發(fā)設(shè)備控制功能(iOS APP開發(fā))導(dǎo)讀:本次教程我們在開源框架代碼基礎(chǔ)上做一個(gè)控制gokit紅燈開的App,Wi-Fi設(shè)備接入機(jī)智云客戶端調(diào)試工具包括 iOS Demo
2016-11-28 18:14:48
開發(fā)者中心產(chǎn)品及設(shè)備應(yīng)用創(chuàng)建(app開發(fā)前傳)開源框架是機(jī)智云的出品,包含Wi-Fi類智能硬件app通用功能的一套源碼。只要是使用機(jī)智云協(xié)議的產(chǎn)品,開發(fā)者開發(fā)配套app時(shí),都可以直接使用該框架的源碼
2016-11-18 16:04:37
視覺SLAM——特征點(diǎn)法與直接法對比以及主流開源方案對比 ORB LSD SVO DSO
2020-06-02 16:56:49
【總結(jié)】視覺SLAM筆記整理
2020-07-17 14:05:20
測解決方案,基于Firefly高性能開源主板,使用機(jī)器視覺和深度神經(jīng)網(wǎng)絡(luò)技術(shù),對攝像頭前方的人體關(guān)鍵特征點(diǎn),包括身體骨骼關(guān)鍵特征點(diǎn)、手指關(guān)鍵點(diǎn),進(jìn)行檢測、定位,使工作機(jī)器精確感知環(huán)境中人體關(guān)鍵點(diǎn)的位置
2022-04-01 15:55:16
Intelligent Vehicles Applications1. 介紹2. HOOFR-SLAM2.1 系統(tǒng)框架2.2 HOOFR特征提取2.3 映射線程2.3.1 特征匹配1. 介紹提出一種HOOFR-...
2021-12-21 06:35:49
本帖最后由 lilin0734 于 2020-11-11 08:22 編輯
Labview通用機(jī)器視覺框架,聯(lián)系微信:***框架功能:1. 相機(jī)配置2. 導(dǎo)入圖片3. 采集圖片4. 各種標(biāo)定
2020-10-10 10:34:29
Vysper是一款服務(wù)器開發(fā)軟件,基于MINA網(wǎng)絡(luò)框架開發(fā)主要用于即時(shí)通訊,向App等客戶端推送消息的。
2019-07-16 07:36:33
labview通用視覺軟件框架,機(jī)器視覺通用框架 通用視覺框架源代碼。可以參考用于開發(fā)常規(guī)案例。里面有部分函數(shù),用戶也可隨意編輯函數(shù),開發(fā)速度超級快。打開前需要先安裝labview、VDM、VAS2019及以上版本。
使用MySQL數(shù)據(jù)庫
2023-08-03 16:57:01
在講過一些常用的視覺檢測算子的基本操作后,今天我們來講一講如何將算法融入到Labview視覺框架的程序中,那么下面大致整理一些編程思路,運(yùn)用我們原有的隊(duì)列命令框架進(jìn)行編寫,是功能命令的激活,比如
2020-08-16 16:48:15
Android系統(tǒng)移植與HAL框架開發(fā)一,視頻教程回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-19 11:36:29
Android系統(tǒng)移植與HAL框架開發(fā)二,視頻教程回復(fù)帖子查看資料下載鏈接:[hide][/hide]
2021-08-19 11:40:29
2016 年,百度 PaddlePaddle 打響了國產(chǎn)深度學(xué)習(xí)框架開源的第一槍。2019 年 4 月,在 Wave Summit 深度學(xué)習(xí)開發(fā)者峰會上,首次發(fā)布了PaddlePaddle 的中文名
2021-07-23 07:36:23
以下問題在使用platformio的ARDUINO框架開發(fā)ESP32-S3時(shí)發(fā)現(xiàn)在drive/ledc.c的Code: Select alluint32_t ledc_get_freq
2023-02-15 06:42:41
、ApproxLS等。他表示,高校院所在探索新方法、新技術(shù)的同時(shí),應(yīng)將部分經(jīng)典技術(shù)開源,保留在公共領(lǐng)域,這將是需要持續(xù)支持和關(guān)注的事情。
工委會委員、復(fù)旦大學(xué)教授楊帆
楊帆從ICPD框架、ICPD
2023-06-16 13:45:17
SLAM是什么?VSLAM技術(shù)框架主要包括哪些?VSLAM技術(shù)擁有哪些核心技術(shù)優(yōu)勢?
2021-07-09 07:29:11
基于視覺的slam自動駕駛,這是我們測試的視頻《基于slam算法的智能機(jī)器人》調(diào)研分析報(bào)告項(xiàng)目背景分析機(jī)器人曾經(jīng)是科幻電影中的形象,可目前已經(jīng)漸漸走入我們的生活。機(jī)器人技術(shù)以包含機(jī)械、電子、自動控制
2021-08-09 09:37:34
嵌入式系統(tǒng)開發(fā)與應(yīng)用——基于視覺的機(jī)器人SLAM入門實(shí)踐1一、OpenCV的安裝與配置1. 下載OpenCV3.4.1并解壓到ubuntu相應(yīng)目錄上2. 下載安裝依賴庫和編譯工具cmake(1)更新
2021-12-16 08:16:12
“關(guān)鍵字:精簡、實(shí)用的電影小程序,適合開發(fā)。”正文:小電影小程序云開發(fā)01—基于微信小程序云開發(fā)框架開發(fā)的。功能非常簡單就兩個(gè)功能。簡單好用。***。具體指引詳見《...
2021-12-30 08:30:39
Opencv是什么呢?如何在RK3288上去安裝Opencv開源計(jì)算機(jī)視覺庫呢?
2022-02-16 07:06:40
什么是框架?如何設(shè)計(jì)框架?嵌入式框架EFC是什么?使用EFC的設(shè)計(jì)方案有哪些實(shí)例?
2021-04-27 06:23:00
魚塘智能控制系統(tǒng)是由哪些模塊組成的?怎樣使用APP開源框架去設(shè)計(jì)一款魚塘智能控制系統(tǒng)呢?
2022-03-01 07:56:31
原則上,是否可以將運(yùn)行 RTOS 映像的 ESP8266 OTA 轉(zhuǎn)換為使用 NonOS 框架開發(fā)的不同映像?
對我來說,閃存的分段方式似乎不同,所以我不太確定這種 OTA 是否可行。
2023-06-02 12:25:54
上手的開源代碼倉(Docs、ArkUI、媒體子系統(tǒng)、測試子系統(tǒng)、啟動恢復(fù)),在【戰(zhàn)“碼”先鋒直播間】,在線講解貢獻(xiàn)指南,幫助熱愛開源的你更好地參與開源共建。第8期直播我們邀請到了深開鴻資深OS框架開
2022-06-27 18:23:02
機(jī)智云物聯(lián)網(wǎng)開源框架App工程(Eclipse工程)https://git.oschina.net/dantang/GizOpenSource_AppKit_Android 介紹:機(jī)智云開源框架
2016-12-27 15:47:27
機(jī)智云物聯(lián)網(wǎng)開源框架App工程(Eclipse工程)介紹:機(jī)智云開源框架(GizOpenSource_AppKit_Android) 是開源的適用于物聯(lián)網(wǎng)的軟件框架,用于無縫的支持設(shè)備到設(shè)備的互聯(lián)
2017-02-15 17:56:40
求大佬分享經(jīng)典的無線射頻識別優(yōu)選方案
2021-12-23 06:58:45
機(jī)器人定位導(dǎo)航中,目前主要涉及到激光SLAM與視覺SLAM,激光SLAM在理論、技術(shù)和產(chǎn)品落地上都較為成熟,因而成為現(xiàn)下最為主流的定位導(dǎo)航方式,在家用掃地機(jī)器人及商用送餐機(jī)器人等服務(wù)機(jī)器人中普遍采用了...
2021-07-05 06:41:57
什么是激光SLAM?視覺VSLAM又是什么?激光SLAM和視覺VSLAM有哪些不同之處?
2021-11-10 07:16:02
在機(jī)智云開發(fā)者中心創(chuàng)建新產(chǎn)品。首先選擇產(chǎn)品分類和方案,為產(chǎn)品添加數(shù)據(jù)點(diǎn),最后為產(chǎn)品創(chuàng)建應(yīng)用。為了幫助大家更好地理解整個(gè)創(chuàng)建過程,我們在視頻里穿插著介紹了開源框架、數(shù)據(jù)點(diǎn)、數(shù)據(jù)點(diǎn)模板、Product key
2016-12-07 10:54:00
本帖最后由 機(jī)智小編 于 2017-11-9 14:54 編輯
物聯(lián)網(wǎng)平臺機(jī)智云Android開源框架入門之旅(一)認(rèn)識框架結(jié)構(gòu),導(dǎo)入PK、APP的id和secret。歡迎來到物聯(lián)網(wǎng)平臺機(jī)智云
2017-11-09 14:37:00
機(jī)器人。 · 針對封閉環(huán)境的自動駕駛,可進(jìn)行特性專門設(shè)計(jì)。 | 封閉場景導(dǎo)航算法支持 除了上面的特征之外,思嵐SLAM3.0相對開源SLAM方案,還支持如:虛擬墻、虛擬軌道、自主充電、電梯調(diào)度
2019-01-21 10:57:46
實(shí)現(xiàn)單目視覺同時(shí)定位與建圖(SLAM)仿真系統(tǒng),描述其設(shè)計(jì)過程。該系統(tǒng)工作性能良好,其SLAM算法可擴(kuò)展性強(qiáng),可以精確逼近真實(shí)單目視覺SLAM過程。以方便SLAM算法的研究為目標(biāo),提
2009-04-15 08:50:37 82
82 針對傳統(tǒng)濾波器方法解決機(jī)器人同時(shí)定位與地圖創(chuàng)建( SLAM)時(shí)的誤差積累問題,提出了一種基于視覺詞典(BOW)的三維SLAM算法,以有效解決機(jī)器人長時(shí)間運(yùn)動下誤差積累的問題。相比圖優(yōu)化SLAM中常
2017-12-22 14:58:132 當(dāng)我們談?wù)?b class="flag-6" style="color: red">SLAM時(shí),最先問到的就是傳感器。SLAM的實(shí)現(xiàn)方式與難度和傳感器的形式與安裝方式密切相關(guān)。傳感器分為激光和視覺兩大類,視覺下面又分三小方向。下面就帶你認(rèn)識這個(gè)龐大家族中每個(gè)成員的特性。
2018-01-09 13:09:0223852 高仙的SLAM2.0技術(shù)體系核心,是基于多傳感器融合+深度學(xué)習(xí)的架構(gòu),即語義SLAM。高仙SLAM2.0技術(shù)方案以語義分析、機(jī)器學(xué)習(xí)為基礎(chǔ),結(jié)合云端實(shí)時(shí)信息處理以及專為多傳感器融合而開發(fā)的專業(yè)算法體系,真正實(shí)現(xiàn)了SLAM在建圖和導(dǎo)航兩個(gè)環(huán)節(jié)的完整應(yīng)用。
2018-05-15 16:48:308534 隨著傳感器種類和安裝方式的不同,SLAM的實(shí)現(xiàn)方式和難度會有很大差異。按傳感器來分,SLAM主要分為激光、視覺兩大類。其中,激光SLAM研究較早,理論和工程均比較成熟。視覺方案目前大部分實(shí)驗(yàn)室研究
2019-05-12 10:31:134896 本文是調(diào)研視覺SLAM中的實(shí)現(xiàn)方法的總結(jié),包括三方面內(nèi)容:姿態(tài)計(jì)算、閉環(huán)檢測、BA優(yōu)化。
2019-05-18 11:49:014035 近年來SLAM系統(tǒng)與其他傳感器的融合成為了一大熱點(diǎn)。
2019-05-24 09:45:0612480 SLAM技術(shù)將賦予為機(jī)器人和智能體前所未有的行動能力。作為當(dāng)前SLAM框架的主要類型,激光SLAM與視覺SLAM必將在相互競爭和融合中發(fā)展,必將帶來機(jī)器人技術(shù)和人工智能技術(shù)的真正革命,也將使得機(jī)器人從實(shí)驗(yàn)室和展示廳中走出來,真正服務(wù)和解放人類。
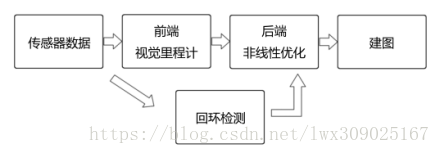
2019-05-25 09:43:524276 SLAM框架解讀1.傳感器數(shù)據(jù)在視覺SLAM中主要為相機(jī)圖像信息的讀取和預(yù)處理。如果在機(jī)器人中,還可能有碼盤,慣性傳感器等信息的讀取和同步。2.視覺里程計(jì)視覺里程計(jì)的主要任務(wù)是估算相鄰圖像間相機(jī)運(yùn)動以及局部
2019-08-09 17:31:201430 SLAM框架解讀1.傳感器數(shù)據(jù)在視覺SLAM中主要為相機(jī)圖像信息的讀取和預(yù)處理。如果在機(jī)器人中,還可能有碼盤,慣性傳感器等信息的讀取和同步。2.視覺里程計(jì)視覺里程計(jì)的主要任務(wù)是估算相鄰圖像間相機(jī)運(yùn)動以及局部
2019-09-11 22:01:351759 近年來,伴隨移動機(jī)器人在各行各業(yè)的廣泛應(yīng)用,SLAM這個(gè)“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應(yīng)用領(lǐng)域、激光SLAM和視覺SLAM哪種方式更有優(yōu)勢等等這些問題卻總是模糊不清。今天,小編就帶大家來詳細(xì)了解一下~
2020-01-18 17:43:003117 加密世界的開源交易大廳-Vitu要做最好的Crypto開源框架 (一)在過去的2月份里,Vitu又做了什么? 于2020年3月,Vitu.AI 宣布正式開源策略框架,目標(biāo)為用戶提供更流暢的一站式數(shù)字
2020-03-25 09:42:23946 3月25日下午,中國人工智能領(lǐng)軍企業(yè)曠視科技舉辦線上發(fā)布會,正式宣布開源新一代AI生產(chǎn)力平臺Brain++的核心深度學(xué)習(xí)框架曠視天元(MegEngine),成為全球首個(gè)將底層框架開源的人工智能企業(yè)。
2020-03-26 11:50:063658 ,就相當(dāng)于人類失去了雙眼一樣。 一、什么是視覺SLAM? SLAM的英文全稱是Simultaneous Localization and Mapping,中文稱作「即時(shí)定位與地圖創(chuàng)建」,而視覺SLAM就是用攝像頭來完成環(huán)境的感知工作。 舉個(gè)例子,當(dāng)你第一天去上大學(xué)的時(shí)候,為了迅速熟悉校園環(huán)境并且找到
2020-04-17 09:21:4153842 近年來,開發(fā)者社區(qū)中,「開源」成了新流行趨勢。
尤其是深度學(xué)習(xí)框架,自騰訊2017年將ncnn開源之后,各大AI實(shí)驗(yàn)室都「慷慨」的將自己的框架開源,以實(shí)現(xiàn)較為快速的創(chuàng)新。
2020-07-10 18:37:371116 在業(yè)內(nèi),視覺SLAM與激光SLAM誰更勝一籌,誰將成為未來主流趨勢這一問題,成為大家關(guān)注的熱點(diǎn),不同的人也有不同的看法及見解,以下將從成本、應(yīng)用場景、地圖精度、易用性幾個(gè)方面來進(jìn)行詳細(xì)闡述。
2020-08-28 14:53:3016068 
當(dāng)我們談?wù)?b class="flag-6" style="color: red">SLAM時(shí),最先問到的就是傳感器。SLAM的實(shí)現(xiàn)方式與難度和傳感器的形式與安裝方式密切相關(guān)。傳感器分為激光和視覺兩大類,視覺下面又分三小方向。
2020-12-26 00:25:302033 SLAM這個(gè)“名字”逐漸被更多的人所熟悉,但是SLAM具體是什么、SLAM有哪些應(yīng)用領(lǐng)域、激光SLAM和視覺SLAM哪種方式更有優(yōu)勢等等這些問題卻總是模糊不清。
2020-12-26 09:39:322084 定位技術(shù)是機(jī)器人實(shí)現(xiàn)自主定位導(dǎo)航的最基本環(huán)節(jié),是機(jī)器人在二維工作環(huán)境中相對于全局坐標(biāo)的位置及其本身的姿態(tài)。目前SLAM (Simultaneous Localization and Mapping即時(shí)定位與地圖構(gòu)建)是業(yè)內(nèi)主流的定位技術(shù),有激光SLAM和視覺SLAM之分。
2020-12-26 10:59:431285 SLAM 是 Simultaneous Localization and Mapping 的縮寫,中文譯作“同時(shí)定位與地圖構(gòu)建”。它是指搭載特定傳感器的主體,在沒有環(huán)境先驗(yàn)信息的情況下,于運(yùn)動過程中建立環(huán)境的模型,同時(shí)估計(jì)自己的運(yùn)動。如果這里的傳感器主要為相機(jī),那就稱為“視覺 SLAM”。
2021-03-20 09:13:123814 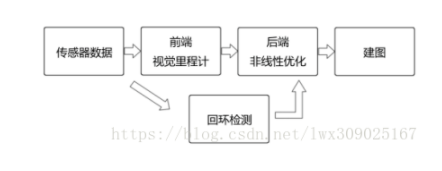
本項(xiàng)目由開發(fā)者發(fā)布在CSDN博客(ID為冷暖自知_源),主要介紹了如何使用機(jī)智云開源框架開發(fā)了一個(gè)智能家居系統(tǒng),具體來說實(shí)現(xiàn)了燈的控制、門禁的控制、溫濕度的讀取、有毒氣體的檢測、人體紅外檢測等功能
2021-04-20 14:25:232024 
機(jī)器視覺系統(tǒng)的經(jīng)典應(yīng)用。
2021-05-28 10:25:5815 機(jī)器視覺檢測系統(tǒng)的最經(jīng)典結(jié)構(gòu)資料免費(fèi)下載。
2021-06-01 09:49:5314 我看來,vslam得發(fā)展也就是從MonoSLAM->PTAM->圖優(yōu)化SLAM->ORB-SLAM為代表的現(xiàn)代slam,其中可能還有許多內(nèi)容,不過這些開源SLAM一定程度上體現(xiàn)了SLAM發(fā)展過程了....
2021-06-18 10:40:521357 
ORB-SLAM)的定位精度不能達(dá)到論文中,或者你預(yù)想的精度,那么這個(gè)事情是可以根據(jù)實(shí)際場景討論的。 排名6, 11, 12, 14, 15的方案是基于視覺的,或者至少融合了視覺。其漂移誤差大都低于1%。這是什么概念?我本科時(shí)參加的機(jī)器人競賽里,經(jīng)過仔細(xì)標(biāo)定的輪式
2021-07-06 10:57:043582 ??其實(shí)使用Arduino框架開發(fā)STM32并不新鮮,但以前大部分人是用Arduino IDE開發(fā)的,本文介紹一下在VS Code中,通過PlatformIO插件開發(fā)STM32。??首先
2021-11-23 18:21:059 算法框架和關(guān)鍵模塊, 分析闡述了近年來的研究熱點(diǎn)問題和未來發(fā)展趨勢, 梳理了3D激光雷達(dá) SLAM 算法性能的評估標(biāo)準(zhǔn), 并據(jù)此選取目前較為成熟的具有代表性的6種開源 3D 激光雷達(dá)SLAM 算法
2022-03-21 16:07:574576 為方便開發(fā)者快速開發(fā)不同設(shè)備端的App,機(jī)智云開源了安卓、iOS、APICloud等形式的框架。該框架封裝了手機(jī)(包括PAD等設(shè)備)與機(jī)智云智能硬件的通訊過程,以及手機(jī)與云端的通訊過程。這些過程包括
2022-03-29 15:48:351252 Apache Spark 是一個(gè)開源框架,適用于跨集群計(jì)算機(jī)并行處理大數(shù)據(jù)任務(wù)。它是在全球廣泛應(yīng)用的分布式處理框架之一。
2022-04-19 14:22:281801 ./oschina_soft/Snake-SLAM.zip
2022-06-16 11:27:432 量子計(jì)算機(jī)的出現(xiàn),需要一定程度的軟件解決方案,為每個(gè)人的量子開發(fā)環(huán)境提供必要的基礎(chǔ)。IBM 憑借其最新的開源軟件開發(fā)工具包 Qiskit,旨在創(chuàng)建一個(gè)編程環(huán)境,使底層技術(shù)的復(fù)雜性不再是用戶的問題。未來,程序?qū)⒉坏貌皇褂么罅康牧孔雍?b class="flag-6" style="color: red">經(jīng)典資源,因此必須以光速優(yōu)化解決方案。
2022-07-26 15:56:151010 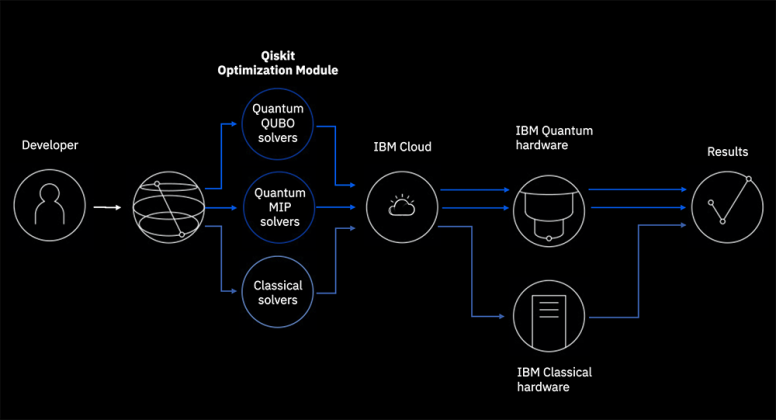
視覺SLAM是一種基于視覺傳感器的 SLAM 系統(tǒng),與激光傳感器相比,視覺傳感器具有成本低、保留環(huán)境語義信息的優(yōu)點(diǎn),能夠與深度學(xué)習(xí)進(jìn)行大量結(jié)合。
2022-11-02 15:02:32746 電子發(fā)燒友網(wǎng)站提供《納米框架Esp32開源分享.zip》資料免費(fèi)下載
2022-11-08 14:36:521 一個(gè)建立在兩個(gè)基于直接法的緊耦合的完整的激光視覺慣導(dǎo)融合的slam框架;
2022-11-09 09:55:541147 視覺SLAM是一種基于視覺傳感器的 SLAM 系統(tǒng),與激光傳感器相比,視覺傳感器具有成本低、保留環(huán)境語義信息的優(yōu)點(diǎn),能夠與深度學(xué)習(xí)進(jìn)行大量結(jié)合。
2022-11-29 21:38:37626 SLAM本質(zhì)上是一個(gè)狀態(tài)估計(jì)問題,根據(jù)傳感器做劃分,主要是激光、視覺兩大類。激光SLAM的研究在理論和工程上都比較成熟,現(xiàn)有的很多行業(yè)已經(jīng)開始使用激光SLAM完成工業(yè)工作;而視覺SLAM
2022-12-02 15:00:281149 電子發(fā)燒友網(wǎng)站提供《物聯(lián)網(wǎng)GitHub框架開源.zip》資料免費(fèi)下載
2022-12-28 09:20:390 使用platformio平臺和Arduino框架開發(fā)STM32G0,開發(fā)環(huán)境使用VSCode+PlatformIO插件;
2023-01-17 11:05:171887 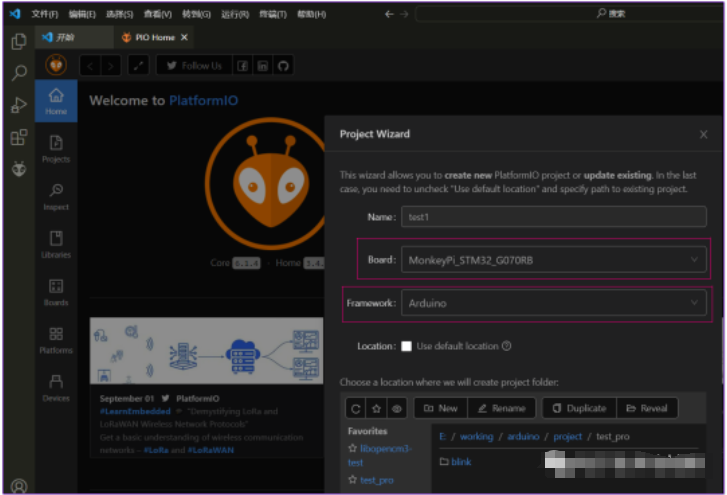
電子發(fā)燒友網(wǎng)站提供《支付檢測智能貨架開源硬件.zip》資料免費(fèi)下載
2023-02-08 15:06:220 基于特征點(diǎn)法的視覺SLAM系統(tǒng)很難應(yīng)用于稠密建圖,且容易丟失動態(tài)對象。而基于直接法的SLAM系統(tǒng)會跟蹤圖像幀之間的所有像素,因此在動態(tài)稠密建圖方面可以取得更完整、魯棒和準(zhǔn)確的結(jié)果。
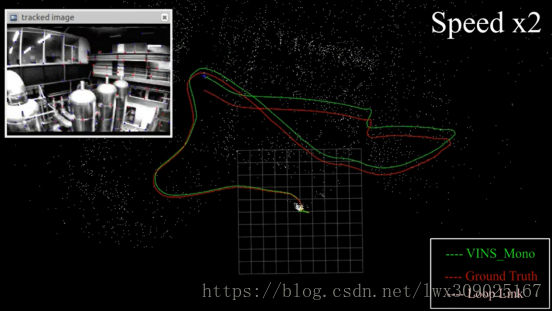
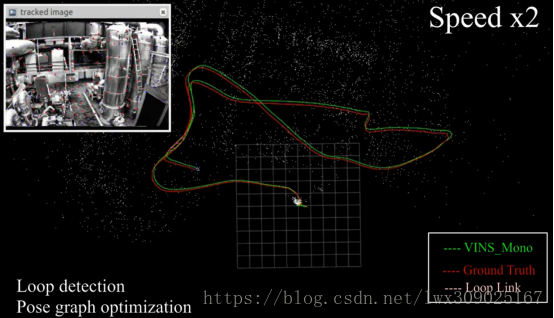
2023-03-13 09:38:45744 視覺里程計(jì)最近幾年越來越受到學(xué)術(shù)界以及工業(yè)界的認(rèn)可,以O(shè)RB和VINS為代表的視覺SLAM已經(jīng)可以滿足絕大多數(shù)場景,而OV2SLAM在其他VSLAM中脫穎而出,其實(shí)時(shí)性以及具體的回環(huán)性能在測試中都得到了認(rèn)可。
2023-03-21 17:16:31765 SLAM 是 Simultaneous Localization and Mapping 的縮寫,中文譯作“同時(shí)定位與地圖構(gòu)建”。它是指搭載特定傳感器的主體,在沒有環(huán)境先驗(yàn)信息的情況下,于運(yùn)動過程中建立環(huán)境的模型,同時(shí)估計(jì)自己的運(yùn)動。
2023-04-23 11:09:471239 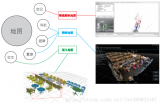
視覺紋理導(dǎo)航,亦稱Visual SLAM導(dǎo)航,通過自動導(dǎo)引車車載視覺傳感器獲取運(yùn)行區(qū)域周的圖像信息來實(shí)現(xiàn)導(dǎo)航的方法。視覺導(dǎo)航是以地面紋理為特征信息的視覺導(dǎo)航AGV
深圳市不止技術(shù)有限公司是激光雷達(dá)
2022-04-29 10:01:032613 
用在SLAM上的傳感器主要可分為兩大類,一種是激光雷達(dá),而另一種是攝像頭,為此,業(yè)內(nèi)人士也將SLAM分為激光SLAM和視覺SLAM。激光SLAM比視覺SLAM起步早,在理論、技術(shù)和產(chǎn)品落地上都相對成熟。
2022-02-15 19:15:241849 
電子發(fā)燒友網(wǎng)站提供《視覺視覺開源項(xiàng)目.zip》資料免費(fèi)下載
2023-06-20 15:18:141 能力也過硬,一般企業(yè)年薪至少30W起步了。 學(xué)習(xí)SLAM主要需要攻克三大難關(guān): 扎實(shí)的數(shù)學(xué)基礎(chǔ) 對整個(gè)SLAM大框架及細(xì)節(jié)部分理解到一定深度 比較高度的編程能力 這三點(diǎn)都絕非易事,需要花很大的功夫,中間也有不少彎路要走。 對于初學(xué)者,推薦以下
2023-06-29 15:28:55337 
對于學(xué)術(shù)研究而言,LeGo-LOAM是激光SLAM的經(jīng)典框架,LeGo-LOAM源碼簡潔清晰,比LOAM算法的代碼可讀性要高很多。近幾年各頂會上的很多SLAM算法設(shè)計(jì)思想都潛移默化地受LeGo-LOAM的影響,對其的改進(jìn)思路相較于LOAM也比較多樣化。
2023-07-03 10:47:08415 
融合。 ? 作為AR和計(jì)算機(jī)視覺領(lǐng)域的領(lǐng)先企業(yè),谷東科技受邀參與本次技術(shù)了論壇,與業(yè)內(nèi)專家和學(xué)者進(jìn)行深入的交流和探討,共同探索SLAM技術(shù)在現(xiàn)實(shí)世界中的發(fā)展和應(yīng)用前景。我們分享了在SLAM技術(shù)方面的最新成果和經(jīng)驗(yàn),包括基于深度學(xué)習(xí)的實(shí)時(shí)地圖構(gòu)
2023-08-01 09:37:23526 labview通用視覺軟件框架,機(jī)器視覺通用框架 通用視覺框架源代碼。可以參考用于開發(fā)常規(guī)案例。里面有部分函數(shù),用戶也可隨意編輯函數(shù),開發(fā)速度超級快。打開前需要先安裝labview、VDM、VAS2019及以上版本。使用MySQL數(shù)據(jù)庫
2023-08-04 15:58:4033 SLAM至今已歷經(jīng)三十多年的研究,這里給出經(jīng)典視覺SLAM框架,這個(gè)框架本身及其包含的算法已經(jīng)基本定型,并且已經(jīng)在許多視覺程序庫和機(jī)器人程序庫中提供。
2023-08-10 14:15:53410 
近年來,SLAM技術(shù)取得了驚人的發(fā)展,領(lǐng)先一步的激光SLAM已成熟的應(yīng)用于各大場景中,視覺SLAM雖在落地應(yīng)用上不及激光SLAM,但也是目前研究的一大熱點(diǎn),今天我們就來詳細(xì)聊聊視覺SLAM的那些事兒。
2023-09-05 09:31:111375 
IMU測量可以提高視覺SLAM在某些復(fù)雜場景的魯棒性,在于相機(jī)快速運(yùn)動、動態(tài)障礙物、光線明暗變化明顯、環(huán)境中紋理缺失等導(dǎo)致圖像信息質(zhì)量較差的情況下,利用IMU信息仍能得到有效的定位結(jié)果。
2023-09-07 16:57:061095 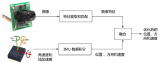
GO-SLAM主要還是基于NeRF進(jìn)行稠密重建,可以發(fā)現(xiàn)相較于NICE-SLAM這些SOTA方案,GO-SLAM重建場景的全局一致性更好,這主要是因?yàn)樗肓嘶丨h(huán)和全局BA來優(yōu)化累計(jì)誤差。
2023-09-11 10:03:29684 
免費(fèi)開源 Http、Https 抓包工具,支持 Windows、Mac、Android、IOS, 全平臺系統(tǒng),使用 Flutter 框架開發(fā)
2023-09-11 11:17:461090 
目前視覺SLAM系統(tǒng)可以在微型個(gè)人計(jì)算機(jī)(PC)和嵌入式設(shè)備中運(yùn)行,甚至可以在智能手機(jī)等移動設(shè)備中運(yùn)行(Klein和Murray,2009)。與室內(nèi)或室外移動機(jī)器人不同,自動駕駛車輛具有更復(fù)雜的參數(shù),尤其是當(dāng)車輛在城市環(huán)境中自動駕駛時(shí)。
2023-12-04 09:22:37544 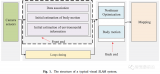
近日,知名AI推理框架開源社區(qū)ONNX Runtime正式發(fā)布支持龍架構(gòu)的版本1.17.0。
2024-03-12 12:23:20225 
正在加载...
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論