

目前,就總裝物流優(yōu)化而言,AGV運(yùn)輸系統(tǒng)導(dǎo)入屬于目前一個(gè)相對(duì)新穎的方向。AGV運(yùn)輸系統(tǒng)在汽車企業(yè)之中才剛發(fā)展起來(lái),還存在較大的優(yōu)化空間。
通過(guò)AGV系統(tǒng)的合理規(guī)劃設(shè)計(jì)與優(yōu)化,就成為汽車企業(yè)現(xiàn)階段需要重點(diǎn)考慮的新課題,其本身對(duì)于生產(chǎn)效率和成本也會(huì)帶來(lái)極大的影響。
一、AGV調(diào)度控制系統(tǒng)需求分析及架構(gòu)設(shè)計(jì)
1.1 需求分析
基于某汽車總裝車間為例,通過(guò)多次的研究分析,其系統(tǒng)需求如下:
第一,能夠滿足交通管制的要求,可以確保在行駛道路干涉情況下,AGV不會(huì)出現(xiàn)撞車、不會(huì)同車間內(nèi)其他物料配送產(chǎn)生路線沖突,可以確保生產(chǎn)效率。
第二,滿足SPS(Set Parts Supply)揀配區(qū)和總裝生產(chǎn)線聯(lián)動(dòng)要求。
第三,可以實(shí)現(xiàn)對(duì)于AGV異常情況、電量以及位置的監(jiān)控處理,并且還可以在系統(tǒng)中顯示其運(yùn)行狀態(tài)。
第四,控制充電站就可以滿足AGV自動(dòng)充電的處理需求,以此來(lái)達(dá)到持續(xù)工作。
第五,能夠匹配兼容性的多類型需求,這樣才可以滿足正常運(yùn)行與管控的要求。
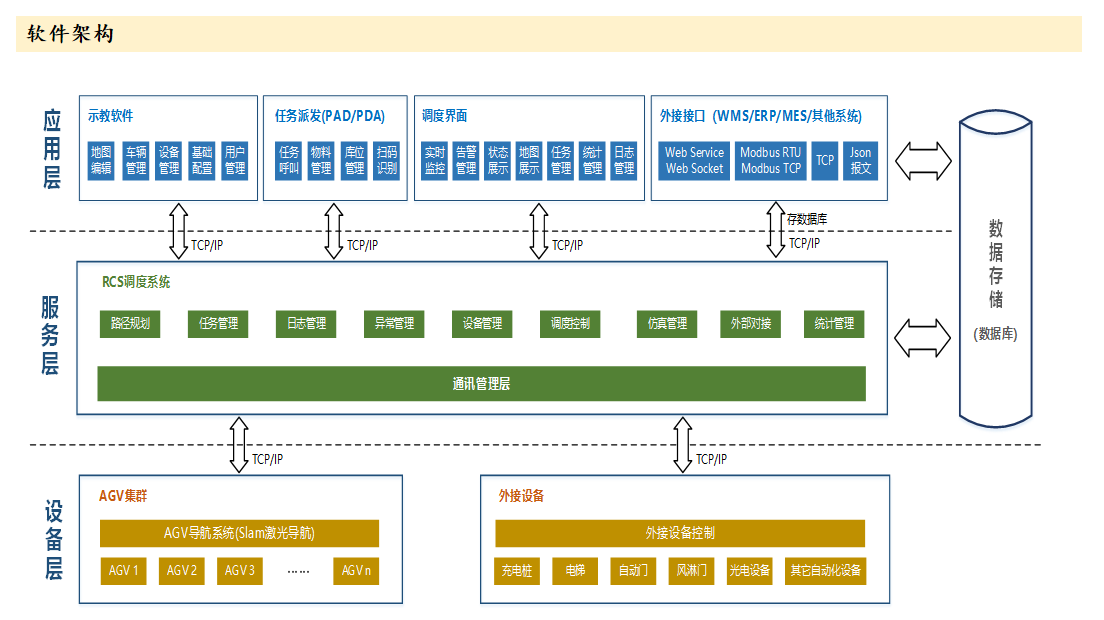
1.2 系統(tǒng)架構(gòu)設(shè)計(jì)
基于系統(tǒng)的實(shí)際需求,針對(duì)系統(tǒng)架構(gòu),其主要包含了三個(gè)層面,具體的AGV調(diào)度控制系統(tǒng)見(jiàn)圖1所示。
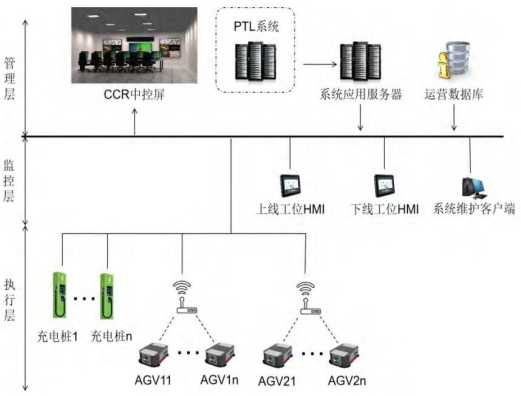
圖1系統(tǒng)硬件架構(gòu)圖
二、AGV調(diào)度控制系統(tǒng)功能開(kāi)發(fā)
2.1 物料配送作業(yè)流程設(shè)計(jì)
基于AGV系統(tǒng),主要是實(shí)現(xiàn)PTL(Pick To Light)系統(tǒng)發(fā)送的SPS物料配送信息的接收,這樣就可以生成對(duì)應(yīng)的配送任務(wù)信息。在系統(tǒng)下發(fā)任務(wù)到待命點(diǎn)的AGV,在接手任務(wù)之后,AGV就會(huì)開(kāi)始執(zhí)行動(dòng)作。
當(dāng)達(dá)到指定地標(biāo)上傳信息,如果屬于交通管制點(diǎn),則需要等待系統(tǒng)的放行指令。反之,則可以直接放行。
當(dāng)AGV到達(dá)任務(wù)地點(diǎn)后,就需要將隨行料車放下,通過(guò)系統(tǒng)就會(huì)自動(dòng)判斷是否需要充電。
如果需要?jiǎng)t開(kāi)始自行充電,如果不需要,則回到待命點(diǎn),針對(duì)其配送作業(yè)流程,見(jiàn)圖2所示。
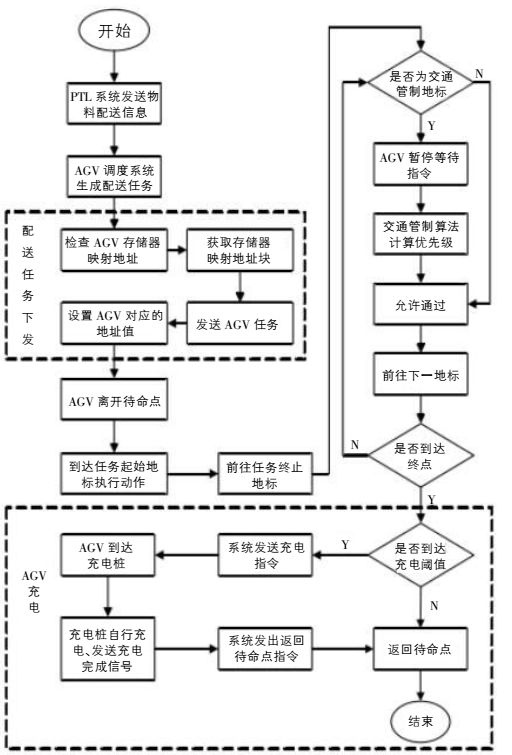
圖2物料配送作業(yè)流程圖
2.2 系統(tǒng)功能設(shè)計(jì)
針對(duì)系統(tǒng)功能而言,其包含了不同的層次。其中,數(shù)據(jù)的聚合層主要是實(shí)現(xiàn)與外圍系統(tǒng)的相互連接,其主要是將多個(gè)工廠不同種類數(shù)據(jù)統(tǒng)一進(jìn)行匯總,將其轉(zhuǎn)化成為系統(tǒng)的標(biāo)準(zhǔn)格式,然后進(jìn)行分權(quán)限的管理。
業(yè)務(wù)層則是對(duì)于業(yè)務(wù)原子的實(shí)際操作,以此來(lái)形成業(yè)務(wù)的功能庫(kù)。應(yīng)用層主要是針對(duì)業(yè)務(wù)功能的組合,然后利用Web相應(yīng)的服務(wù),就可以實(shí)現(xiàn)用戶層的使用要求。
針對(duì)用戶層,其本身會(huì)考慮到用戶所處的環(huán)境和相應(yīng)習(xí)慣,從而提供對(duì)應(yīng)的客戶端,見(jiàn)圖3所示。
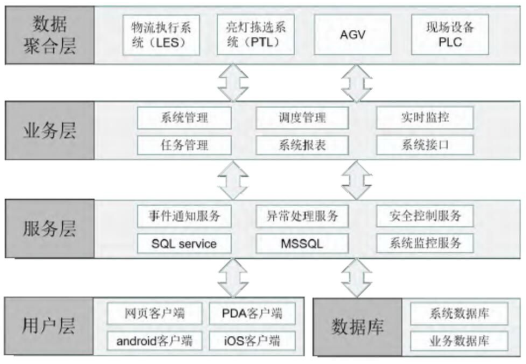
圖3功能架構(gòu)圖
2.3 空箱回收作業(yè)流程設(shè)計(jì)
等待料車上的物料完成裝配之后,就需要由工人直接將空料車推送到指定的地點(diǎn),基于下線工位HMI,實(shí)現(xiàn)空箱回收作業(yè)指令對(duì)應(yīng)的發(fā)放,等待信息被調(diào)度系統(tǒng)接收之后,就會(huì)發(fā)送對(duì)應(yīng)的回收信號(hào),從而開(kāi)展后續(xù)的作業(yè)處理。
針對(duì)循環(huán)調(diào)度作業(yè),其具體的流程見(jiàn)圖4所示。
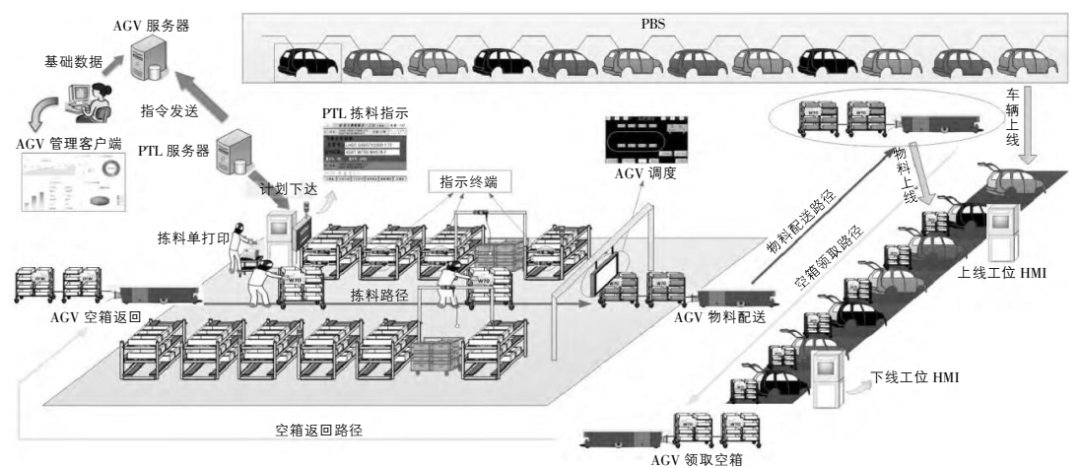
圖4AGV調(diào)度過(guò)程示意圖
三、AGV調(diào)度控制系統(tǒng)功能實(shí)現(xiàn)
3.1 系統(tǒng)管理
基于系統(tǒng)功能設(shè)計(jì),再結(jié)合現(xiàn)場(chǎng)操作的實(shí)際分析,在相應(yīng)的功能之中囊括了調(diào)度管理、系統(tǒng)管理、任務(wù)管理、實(shí)時(shí)監(jiān)控、系統(tǒng)報(bào)表以及系統(tǒng)接口等組成部分。
系統(tǒng)管理則需要是滿足對(duì)于用戶的管理、操作日志管理以及權(quán)限設(shè)置等相應(yīng)的功能實(shí)現(xiàn)。
3.2 基礎(chǔ)數(shù)據(jù)管理
針對(duì)基礎(chǔ)數(shù)據(jù)方面的管理,其主要是針對(duì)AGV信息、位置信息、物流路徑、動(dòng)作信息等多個(gè)方面的內(nèi)容,針對(duì)具體的位置信息管理界面。
3.3 調(diào)度管理
AGV調(diào)度系統(tǒng)中,核心模塊為調(diào)度管理,其主要是能夠?qū)崿F(xiàn)路徑的計(jì)算、信息的接收、選擇AGV、運(yùn)動(dòng)控制、交通管制、充電等處理。
針對(duì)作業(yè)信息的具體接收,就是要求接收相應(yīng)觸發(fā)AGV的作業(yè),其主要包含了空箱回收、物料配送、AGV充電等,針對(duì)具體的物料請(qǐng)求界面。
在AGV物料配送和對(duì)應(yīng)的空箱回收等信息被系統(tǒng)所獲取后,首先就會(huì)直接選擇處于空閑狀態(tài)的AGV來(lái)下達(dá)對(duì)應(yīng)的指令。但是如果沒(méi)有處于空閑狀態(tài)的,則需要將這一項(xiàng)作業(yè)掛起,等待空閑的時(shí)候再一次進(jìn)行派發(fā)。
同時(shí),系統(tǒng)接收到AGV作業(yè)指令之后,通過(guò)作業(yè)的起始/結(jié)束為止,然后與基礎(chǔ)數(shù)據(jù)之中的RFID站點(diǎn)號(hào)相結(jié)合起來(lái),從而實(shí)現(xiàn)作業(yè)路徑的自動(dòng)計(jì)算。在一項(xiàng)作業(yè)完成之后,系統(tǒng)就需要確認(rèn)作業(yè)具體的完成情況,并且將AGV設(shè)定到空閑狀態(tài)。
3.4 實(shí)時(shí)監(jiān)控
實(shí)時(shí)監(jiān)控中,其對(duì)應(yīng)的環(huán)節(jié)包含調(diào)度總覽、AGV狀態(tài)監(jiān)視、作業(yè)監(jiān)視等。考慮到級(jí)別之間的差異性,系統(tǒng)就可以對(duì)應(yīng)的實(shí)現(xiàn)監(jiān)控處理,這樣才能夠滿足運(yùn)行情況、物料配送情況等問(wèn)題加以呈現(xiàn)。
同時(shí),用戶可以通過(guò)對(duì)于AGV運(yùn)行路線、運(yùn)行狀態(tài)、電量狀態(tài)、運(yùn)行速度等對(duì)應(yīng)的數(shù)據(jù)查看,以便將系統(tǒng)之中每一臺(tái)AGV執(zhí)行作業(yè)的具體情況落實(shí)。
四、結(jié)語(yǔ)
總而言之,隨著新能源汽車的不斷發(fā)展,傳統(tǒng)汽車企業(yè)面臨較大的挑戰(zhàn)。因此,通過(guò)對(duì)于AGV系統(tǒng)的研究與推廣,這樣就可以幫助汽車企業(yè)不斷的提升自身的效率,確保其能夠做大做強(qiáng),以此來(lái)促進(jìn)產(chǎn)業(yè)升級(jí)。
伴隨著工業(yè)智能化、信息化、網(wǎng)絡(luò)化的持續(xù)發(fā)展,越來(lái)越多的新智能科技、新路徑規(guī)劃技術(shù)、新管理思維出現(xiàn)在現(xiàn)實(shí)之中,并且在自動(dòng)物流配送系統(tǒng)之中得到廣泛的使用,相信未來(lái)的汽車工業(yè)必定能夠獲取更好更快的發(fā)展。
審核編輯:劉清
-
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6752瀏覽量
111777 -
AGV
+關(guān)注
關(guān)注
27文章
1430瀏覽量
41970 -
SPS
+關(guān)注
關(guān)注
1文章
71瀏覽量
10674
原文標(biāo)題:AGV調(diào)度系統(tǒng)構(gòu)架設(shè)計(jì)
文章出處:【微信號(hào):vision263com,微信公眾號(hào):新機(jī)器視覺(jué)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
AGV系統(tǒng)構(gòu)成
介紹自動(dòng)導(dǎo)引車(AGV)簡(jiǎn)易車載控制系統(tǒng)的實(shí)現(xiàn)過(guò)程
自動(dòng)導(dǎo)引車(AGV)車載控制系統(tǒng)的實(shí)現(xiàn)過(guò)程
AGV的基本概念及基本結(jié)構(gòu)組成
怎樣去搭建一種簡(jiǎn)易的AGV車載控制系統(tǒng)
基于STM32微控制器的掃地機(jī)器人控制系統(tǒng)硬件架構(gòu)設(shè)計(jì)
AGV機(jī)器人調(diào)度控制系統(tǒng)
簡(jiǎn)單介紹一下agv調(diào)度控制系統(tǒng)常見(jiàn)的軟件應(yīng)用
智能AGV調(diào)度系統(tǒng)智能規(guī)劃路線
基于STM32微控制器的掃地機(jī)器人控制系統(tǒng)硬件架構(gòu)設(shè)計(jì)
詳解AGV小車和控制系統(tǒng)之間的通信過(guò)程
AGV調(diào)度系統(tǒng):智能搬運(yùn)機(jī)器人的控制中心
AGV小車調(diào)度系統(tǒng)的11種強(qiáng)大功能
智能AGV調(diào)度系統(tǒng)

工業(yè)自動(dòng)化之AGV控制系統(tǒng)通訊方案與接口設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論