

什么是更新位?
為了幫助信號或信號組的接收端來識別發送端是否在發送前更新了信號或信號組的數據,AUTOSAR COM模塊整出了“更新位”(Update Bit),它表征的是發送端RTE在通過I-PDU傳遞給PDUR前,信號是否更新。
如果傳輸模式設置為“DIRECT”,那就沒有更新位一說了。
通過配置發送端和接收端,每個信號或信號組都可以分配一個更新位,來表征其更新狀態,配置參數為 ComUpdateBitPosition ,因此可以知道,信號和對應的更新位在相同I-PDU內,即在CAN總線上,位于相同一幀CAN報文中。當然,信號或信號組也可以不配置更新位。
拿發送端來看。
當RTE調用Com_SendSignal函數來更新信號值(或者調用Com_SendSignalGroup更新信號組)時,AUTOSAR COM模塊將會將UB置為1。
當PduR_ComTransmit函數將I-PDU中的函數發送出去并反饋E_OK后,AUTOSAR COM模塊將會把信號或信號組對應的UB清為0,此時需要將參數數ComTxIPduClearUpdateBit配置為傳輸(Transmit)。
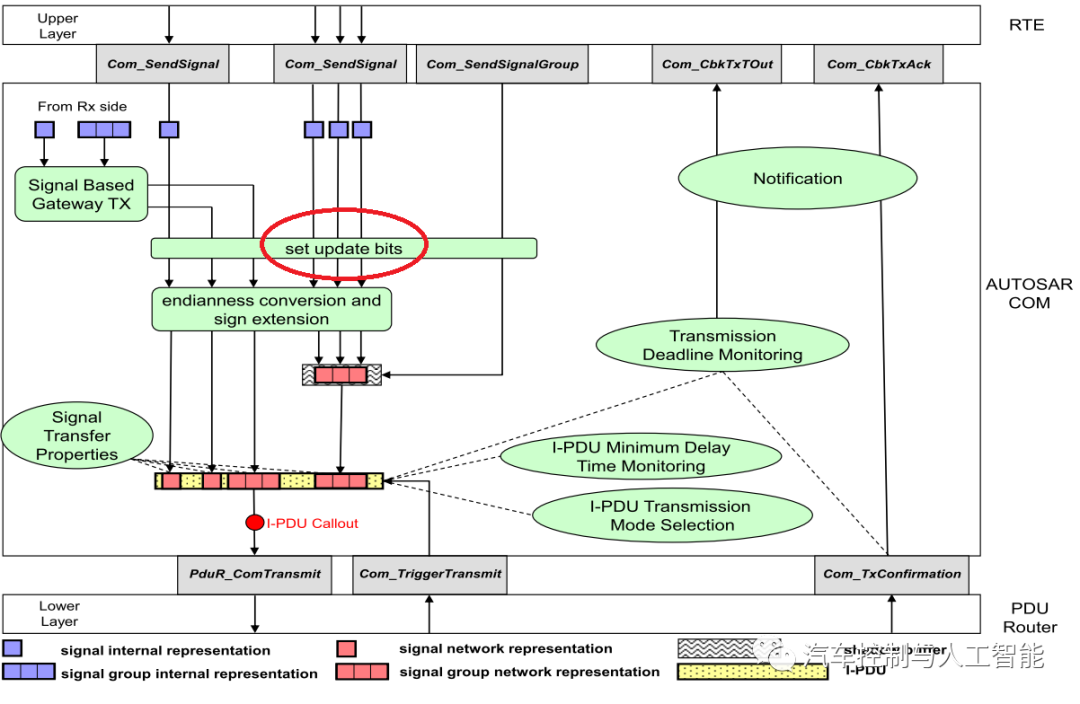
當PduR_ComTransmit函數將I-PDU中的函數發送出去,反饋E_OK并成功確認后,AUTOSAR COM模塊將會把信號或信號組對應的UB清為0,此時,參數ComTxIPduClearUpdateBit 需要配置為確認(Confirmation)。
當*** Com_TriggerTransmit*** 函數成功請求I-PDU的信號后,AUTOSAR COM模塊將會把信號或信號組對應的UB清為0,此時,參數ComTxIPduClearUpdateBit需要配置為觸發傳輸(TriggerTransmit)。
當然,在通信矩陣的說明文檔制作之時,就應該規定好信號或信號組合對應更新位的關系。比如,在制作dbc文件時,要標注報文消息中信號A和對應的更新位A _UB,以及信號組G和對應信號組的更新位G_UB。同時,信號和對應更新位一定要在相同消息中傳遞。如果dbc將一個信號的更新位單獨拿出來,做成了兩個信號,那么配置工具將無法進行更新位的配置。也正因為更新位是定義在相同一幀消息報文中,所以通信矩陣確認定義好,根據通信矩陣的定義配置即可。
**對于更新位來說,0是未更新,1是已更新。
**
那么,使用UB有什么好處呢?
試想,車內各控制器節點通過CAN傳遞數據。假設PEPS節點通過一條報文消息將起動請求信號A傳遞給TCU節點,但并不想把點火開關信號B傳遞給TCU,從網絡布置最大化來看,剛好A和B處在同一幀報文中,TCU在接收到報文消息后判斷是否響應B。
有了UB以后,就可以輕松處理該場景了。TCU接收到B后先判斷B_UB是否置1,PEPS顯然不希望將B_UB置1,這時,PEPS就可以一直保持B_UB一直為0,TCU就無法更新接收到的B信號了。CAN矩陣不需要制作很多版本,即滿足了歸一化的需求,也實現了不同項目的個性化配置。
-
CAN
+關注
關注
57文章
2884瀏覽量
466669 -
AUTOSAR
+關注
關注
10文章
371瀏覽量
22383 -
PDU
+關注
關注
0文章
96瀏覽量
17227 -
Com
+關注
關注
1文章
109瀏覽量
41137
發布評論請先 登錄
OFDM在短波通信中的應用
在STM32的CAN收發通信中,接收超時為什么不能發出一個報文的功能?
c8051f060在基于CAN通信中接收程序有什么作用?
PIC16F87X在CAN通信中的應用
CAN總線在多機通信中的應用

PCI接口在CAN通信中有何作用?
不容忽視的小電阻:CAN(FD)終端電阻在汽車通信中的關鍵角色






 工商網監
工商網監

評論